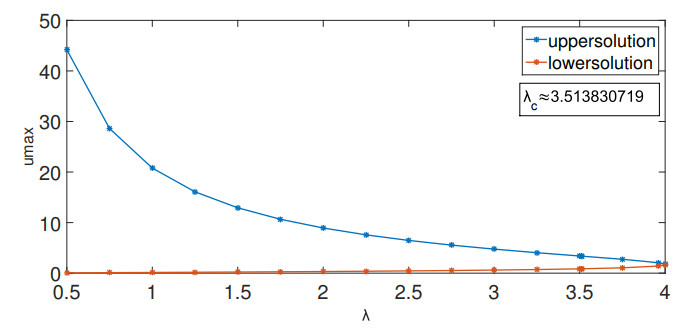
In this paper, we used the nonstandard compact finite difference method to numerically solve one-dimensional truncated Bratu-Picard equations and discussed the convergence analysis of the proposed method. Depending on the parameters in the mentioned equation, it may have no solution, one solution, or two solutions; also, it may have infinitely many solutions. The numerical results show that our method covers all mentioned aspects depending on the parameters in the equation.
Citation: Maryam Arabameri, Raziyeh Gharechahi, Taher A. Nofal, Hijaz Ahmad. A nonstandard compact finite difference method for a truncated Bratu–Picard model[J]. AIMS Mathematics, 2024, 9(10): 27557-27576. doi: 10.3934/math.20241338
In this paper, we used the nonstandard compact finite difference method to numerically solve one-dimensional truncated Bratu-Picard equations and discussed the convergence analysis of the proposed method. Depending on the parameters in the mentioned equation, it may have no solution, one solution, or two solutions; also, it may have infinitely many solutions. The numerical results show that our method covers all mentioned aspects depending on the parameters in the equation.

| [1] |
R. Buckmire, Application of a Mickens finite-difference scheme to the cylindrical Bratu-Gelfand problem, Numer. Methods Partial Differ. Equ., 20 (2004), 327–337. https://doi.org/10.1002/num.10093 doi: 10.1002/num.10093

|
| [2] |
J. S. McGough, Numerical continuation and the Gelfand problem, Appl. Math. Comput., 89 (1998), 225–239. https://doi.org/10.1016/S0096-3003(97)81660-8 doi: 10.1016/S0096-3003(97)81660-8
|
| [3] |
H. Ahmad, R. Nawaz, F. Zia, M. Farooq, B. Almohsen, Application of novel method to withdrawal of thin film flow of a magnetohydrodynamic third grade fluid, Ain Shams Eng. J., 14 (2024), 102885. https://doi.org/10.1016/j.asej.2024.102885 doi: 10.1016/j.asej.2024.102885
|
| [4] |
M. I. Syam, A. Hamdan, An efficient method for solving Bratu equations, Appl. Math. Comput., 176 (2006), 704–713. https://doi.org/10.1016/j.amc.2005.10.021 doi: 10.1016/j.amc.2005.10.021
|
| [5] | A. Akgul, H. Ahmad, Reproducing kernel method for Fangzhu's oscillator for water collection from air, Math. Methods Appl. Sci., 2020. https://doi.org/10.1002/mma.6853 |
| [6] |
A. M. Wazwaz, Adomian decomposition method for a reliable treatment of the Bratu-type equations, Appl. Math. Comput., 166 (2005), 652–663. https://doi.org/10.1016/j.amc.2004.06.059 doi: 10.1016/j.amc.2004.06.059
|
| [7] |
J. H. He, Some asymptotic methods for strongly nonlinear equations, Int. J. Mod. Phys. B, 20 (2006), 1141–1199. https://doi.org/10.1142/S0217979206033796 doi: 10.1142/S0217979206033796
|
| [8] |
J. H. He, Variational approach to the Bratu's problem, J. Phys. Conf. Ser., 96 (2008), 012087. https://doi.org/10.1088/1742-6596/96/1/012087 doi: 10.1088/1742-6596/96/1/012087
|
| [9] |
S. Liao, Y. Tan, A general approach to obtain series solutions of nonlinear differential equations, Stud. Appl. Math., 119 (2007), 297–354. https://doi.org/10.1111/j.1467-9590.2007.00387.x doi: 10.1111/j.1467-9590.2007.00387.x
|
| [10] |
M. Abdelhakem, H. Moussa, Pseudo-spectral matrices as a numerical tool for dealing BVPs, based on Legendre polynomials' derivatives, Alex. Eng. J., 66 (2023), 301–313. https://doi.org/10.1016/j.aej.2022.11.006 doi: 10.1016/j.aej.2022.11.006
|
| [11] |
M. Abdelhakem, D. Baleanu, P. Agarwal, H. Moussa, Approximating system of ordinary differential-algebraic equations via derivative of Legendre polynomials operational matrices, Int. J. Mod. Phys. C, 34 (2023), 2350036. https://doi.org/10.1142/S0129183123500365 doi: 10.1142/S0129183123500365
|
| [12] |
M. Abdelhakem, M. Fawzy, M. El-Kady, H. Moussa, An efficient technique for approximated BVPs via the second derivative Legendre polynomials pseudo-Galerkin method: certain types of applications, Results Phys., 43 (2022), 106067. https://doi.org/10.1016/j.rinp.2022.106067 doi: 10.1016/j.rinp.2022.106067
|
| [13] |
A. J. Ali, A. F. Abbas, M. A. Abdelhakem, Comparative analysis of Adams-Bashforth-Moulton and Runge-Kutta methods for solving ordinary differential equations using MATLAB, Math. Model. Eng. Probl., 11 (2024), 641–647. http://doi.org/10.18280/mmep.110307 doi: 10.18280/mmep.110307
|
| [14] |
M. Abdelhakem, Y. H. Youssri, Two spectral legendre's derivative algorithms for Lane-Emden, Bratu equations, and singular perturbed problems, Appl. Numer. Math., 169 (2021), 243–255. https://doi.org/10.1016/j.apnum.2021.07.006 doi: 10.1016/j.apnum.2021.07.006
|
| [15] |
S. A. Khuri, A new approach to Bratu's problem, Appl. Math. Comput., 147 (2004), 131–136. https://doi.org/10.1016/S0096-3003(02)00656-2 doi: 10.1016/S0096-3003(02)00656-2
|
| [16] |
S. Abbasbandy, M. S. Hashemi, C. S. Liu, The Lie-group shooting method for solving the Bratu equation, Commun. nonlinear Sci. Numer. Simul., 16 (2011), 4238–4249. https://doi.org/10.1016/j.cnsns.2011.03.033 doi: 10.1016/j.cnsns.2011.03.033
|
| [17] |
P. Korman, Y. Li, T. Ouyang, Exact multiplicity results for boundary value problems with nonlinearities generalizing cubic, Proc. Roy. Soc. Edinb.: Sec. A Math., 126 (1996), 599–616. https://doi.org/10.1017/S0308210500022927 doi: 10.1017/S0308210500022927
|
| [18] |
A. Mohsen, L. F. Sedeck, S. A. Mohamed, New smoother to enhanced multigrid-based methods for the Bratu problem, Appl. Math. Comput., 204 (2008), 325–339. https://doi.org/10.1016/j.amc.2008.06.058 doi: 10.1016/j.amc.2008.06.058
|
| [19] |
J. P. Boyd, One-point pseudo spectral collocation for the one dimensional Bratu equation, Appl. Math. Comput., 217 (2011), 5553–5565. https://doi.org/10.1016/j.amc.2010.12.029 doi: 10.1016/j.amc.2010.12.029
|
| [20] |
U. Erdogan, T. Ozis, A smart nonstandard finite difference scheme for second order nonlinear boundary value problems, J. Comput. Phys., 230 (2011), 6464–6574. https://doi.org/10.1016/j.jcp.2011.04.033 doi: 10.1016/j.jcp.2011.04.033
|
| [21] |
A. S. Mounim, B. M. de Dormale, From the fitting technique to accurate schemes for the Liouville-Bratu-Gelfand problem, Numer. Methods Partial Differ. Equ., 22 (2006), 761–775. https://doi.org/10.1002/num.20116 doi: 10.1002/num.20116
|
| [22] |
R. Gharechahi, M. Arab Ameri, M. Bisheh-Niasar, High order compact finite difference schemes for solving Bratu-type equations, J. Comput. Appl. Mech., 5 (2019), 91–102. https://doi.org/10.22055/JACM.2018.25696.1288 doi: 10.22055/JACM.2018.25696.1288
|
| [23] |
P. A. Zegeling, S. Iqbal, Nonstandard finite differences for a truncated Bratu–Picard model, Appl. Math. Comput., 324 (2018), 266–284. https://doi.org/10.1016/j.amc.2017.12.005 doi: 10.1016/j.amc.2017.12.005
|
| [24] |
P. G. Zhang, J. P. Wang, A predictor-corrector compact finite difference scheme for Burgers' equation, Appl. Math. Comput., 219 (2012), 892–898. https://doi.org/10.1016/j.amc.2012.06.064 doi: 10.1016/j.amc.2012.06.064
|
| [25] |
R. Mickens, Difference equation models of differential equations having zero local truncation errors, North-Holland Math. Stud., 92 (1984), 445–449. https://doi.org/10.1016/S0304-0208(08)73728-9 doi: 10.1016/S0304-0208(08)73728-9
|
| [26] | R. Mickens, Nonstandard finite difference models of differential equations, World Scientific, 1993. https://doi.org/10.1142/2081 |
| [27] |
A. Mohsen, A simple solution of the Bratu problem, Comput. Math. Appl., 67 (2014), 26–33. https://doi.org/10.1016/j.camwa.2013.10.003 doi: 10.1016/j.camwa.2013.10.003
|
Figures(9) / Tables(11)

Maryam Arabameri, Raziyeh Gharechahi, Taher A. Nofal, Hijaz Ahmad. A nonstandard compact finite difference method for a truncated Bratu–Picard model[J]. AIMS Mathematics, 2024, 9(10): 27557-27576. doi: 10.3934/math.20241338







 DownLoad:
DownLoad: