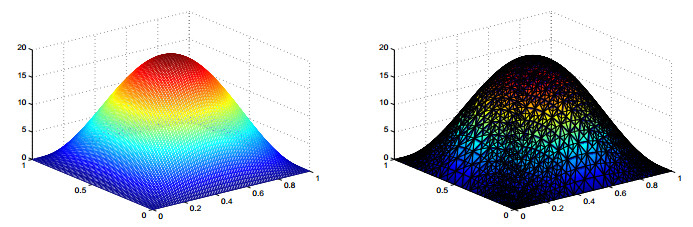
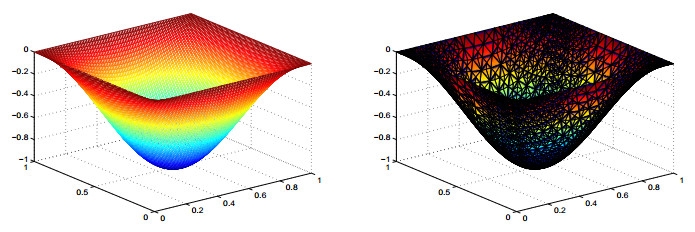
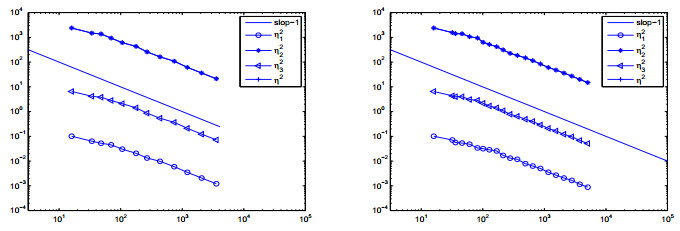
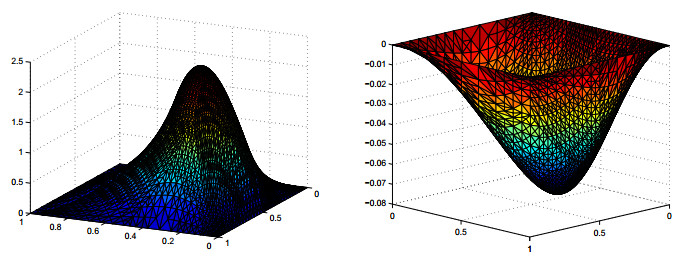
This paper investigates the adaptive finite element method for an optimal control problem governed by a bilinear elliptic equation. We establish the finite element discrete scheme for the bilinear optimal control problem and use a dual argument, linearization method, bubble function, and new bubble function to obtain a posteriori error estimates. To prove the convergence and the quasi-optimality for adaptive finite element methods, we introduce the adaptive finite element algorithm, local perturbation, error reduction, discrete local upper bound, Dörfler property, dual argument method, and quasi orthogonality. A few numerical examples are given at the end of the paper to demonstrate our theoretical analysis.
Citation: Zuliang Lu, Xiankui Wu, Fei Huang, Fei Cai, Chunjuan Hou, Yin Yang. Convergence and quasi-optimality based on an adaptive finite element method for the bilinear optimal control problem[J]. AIMS Mathematics, 2021, 6(9): 9510-9535. doi: 10.3934/math.2021553
This paper investigates the adaptive finite element method for an optimal control problem governed by a bilinear elliptic equation. We establish the finite element discrete scheme for the bilinear optimal control problem and use a dual argument, linearization method, bubble function, and new bubble function to obtain a posteriori error estimates. To prove the convergence and the quasi-optimality for adaptive finite element methods, we introduce the adaptive finite element algorithm, local perturbation, error reduction, discrete local upper bound, Dörfler property, dual argument method, and quasi orthogonality. A few numerical examples are given at the end of the paper to demonstrate our theoretical analysis.

| [1] |
M. Ainsworth, J. T. Oden, A posteriori error estimators in finite element analysis, Comput. Methods Appl. Mech. Engrg., 142 (1997), 1–88. doi: 10.1016/S0045-7825(96)01107-3

|
| [2] |
I. Babuška, W. C. Rheinboldt, Error estimates for adaptive finite computations, SIAM J. Numer. Anal., 15 (1978), 736–754. doi: 10.1137/0715049
|
| [3] | P. Binev, W. Dahmen, R. Devore, Adaptive finite element approximation for distributed elliptic optimal control problems, SIAM J. Control Optim., 97 (2004), 219–268. |
| [4] |
L. Zhang, Z. Zhou, Spectral galerkin approximation of optimal control problem governed by riesz fractional differential equation, Appl. numer. math., 143 (2019), 247–262. doi: 10.1016/j.apnum.2019.04.003
|
| [5] | F. Wang, Z. Zhang, Z. Zhou, A spectral galerkin approximation of optimal control problem governed by fractional advection diffusion reaction equations, J. Comput. Appl. Math., 386 (2021), 113–129. |
| [6] |
N. Du, H. Wang, W. B. Liu, A fast gradient projection method for a constrained fractional optimal control, J. Sci. Comput., 68 (2016), 1–20. doi: 10.1007/s10915-015-0125-1
|
| [7] | P. G. Ciarlet, The Finite Element Method for Elliptic Problems, Amsterdam: North-Holland, 1978. |
| [8] |
Z. Chen, J. Feng, An adaptive finite element algorithm with reliable and efficient error for linear parabolic problems, Math. Comput., 73 (2004), 1167–1193. doi: 10.1090/S0025-5718-04-01634-5
|
| [9] | Y. Chen, Z. Lu, High Efficient and Accuracy Numerical Methods for Opyimal Control Problems, Science Press, Beijing, 2015. |
| [10] |
Y. Chen, Z. Lu, Y. Huang, Superconvergence of triangular Raviart-Thomas mixed finite element methods for a bilinear constrained optimal control problem, Comput. Math. Appl., 66 (2013), 1498–1513. doi: 10.1016/j.camwa.2013.08.019
|
| [11] | Y. Chen, Z. Lu, L. Liu, Numerical Methods for Partial Differential Equations, Science Press, Beijing, 2015. |
| [12] |
J. M. Cascon, C. Kreuzer, R. H. Nochetto, K. G. Siebert, Qusi-optimal convergence rate for an adaptive finite element method, SIAM J. Numer. Anal., 46 (2008), 2524–2550. doi: 10.1137/07069047X
|
| [13] |
W. Dörfler, A convergent adaptive algorithm for Poisson equation, SIAM J. Numer. Anal., 33 (1996), 1106–1124. doi: 10.1137/0733054
|
| [14] |
A. Demlow, R. Stevenson, Convergence and quasi-optimality of an adaptive finite element method for controlling $L^2$ errors, Numer. Math., 117 (2011), 185–218. doi: 10.1007/s00211-010-0349-9
|
| [15] |
A. Gaevskaya, R. H. W. Hoppe, Y. Iliash, M. Kieweg, Convergence anlysis of an adaptive finite element for distributed control problems with control constraints, Int. Serises Numer. Math., 155 (2007), 47–68. doi: 10.1007/978-3-7643-7721-2_3
|
| [16] |
L. Ge, W. Liu, D. Yang, Adaptive finite element approximation for a constrained optimal control problem via multi-meshes, J. Sci. Comput., 41 (2009), 238–255. doi: 10.1007/s10915-009-9296-y
|
| [17] | L. Ge, W. Liu, D. Yang, $L^2$ norm equivalent a posteriori error estimate for a constrained optimal control problem, Inter. J. Numer. Anal. Model., 6 (2009), 335–353. |
| [18] |
W. Gong, N. Yan, Adaptive finite element method for elliptic optimal control problems: convergence and optimality, Numer. Math., 135 (2017), 1121–1170. doi: 10.1007/s00211-016-0827-9
|
| [19] | L. He, A. Zhou, Comvergence and optimality of adaptive finite element methods for elliptic partial differential equations, Int. J. Numer. Anal. Model., 8 (2011), 1721–1743. |
| [20] | H. Leng, Y. Chen, Convergence and quasi-optimality of an adaptive finite element method for optimal control problems with integral control constraint, Adv. Comput. Math., 44 (2018), 1367–1394. |
| [21] | R. Li, W. Liu, H. Ma, T. Tang, Adaptive finite element methods with convergence rates, Numer. Math., 41 (2002), 1321–1349. |
| [22] | W. Liu, N. Yan, Adaptive Finite Element Methods for Optimal Control Governed by PDEs, Science Press, Beijing, 2008. |
| [23] | Z. Lu, S. Zhang, $L^\infty$-error estimates of rectangular mixed finite element methods for bilinear optimal control problem, Appl. Math. Comput., 300 (2017), 79–94. |
| [24] |
P. Morin, R. H. Nochetto, K. G. Siebert, Data oscillation and convergence of adaptive FEM, SIAM J. Numer. Anal., 33 (1996), 1106–1124. doi: 10.1137/0733054
|
| [25] | P. Morin, R. H. Nochetto, K. G. Siebert, Convergence of adaptive finite element methods, SIAM Reviews, 44 (2000), 466–488. |
| [26] |
R. Stevenson, Optimality of a standard adaptive finite element method, Found Comput. Math., 7 (2007), 245–269. doi: 10.1007/s10208-005-0183-0
|
| [27] | R. Verfurth, A Review of A Posteriori Error Estimation and Adaptive Mesh Refinement, Comput. Methods Appl. Mech. Engrg., Wiley-Teubner, London, 1996. |
| [28] | J. Xu, A. Zhou, Local and parallel finite element algorithms based on two-grid discretizations, Math. Comput., 69 (1996), 881–909. |
Figures(5)

Zuliang Lu, Xiankui Wu, Fei Huang, Fei Cai, Chunjuan Hou, Yin Yang. Convergence and quasi-optimality based on an adaptive finite element method for the bilinear optimal control problem[J]. AIMS Mathematics, 2021, 6(9): 9510-9535. doi: 10.3934/math.2021553







 DownLoad:
DownLoad: