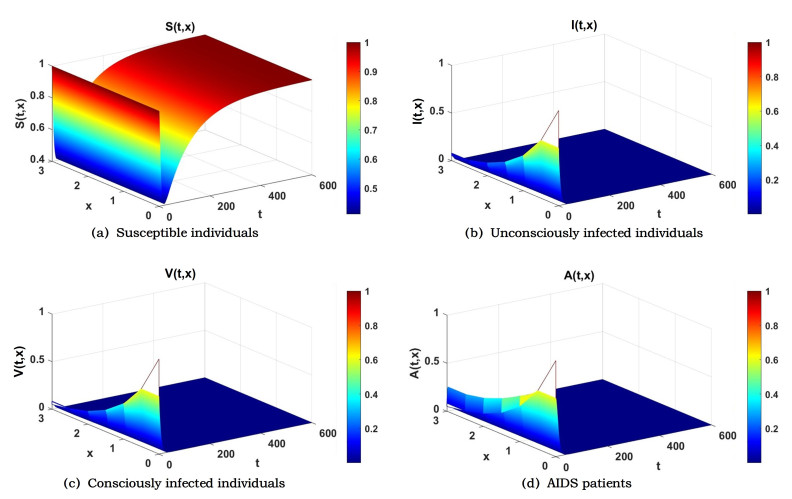
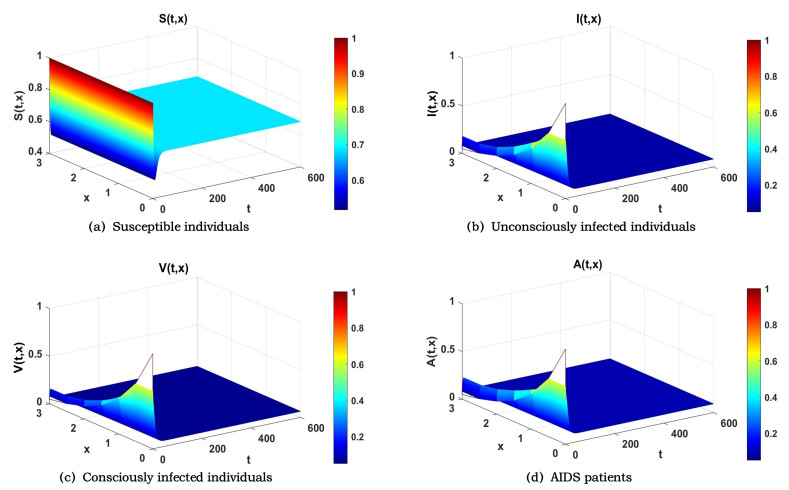
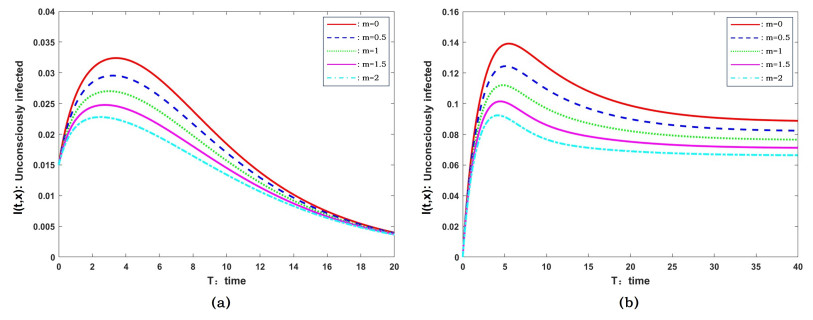
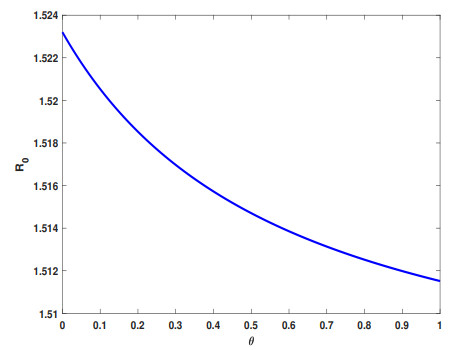
Considering the influence of population heterogeneity, media coverage and spatial diffusion on disease transmission, this paper investigated an acquired immunodeficiency syndrome (AIDS) reaction-diffusion model with nonlinear incidence rates and media coverage. First, we discussed the positivity and boundedness of system solutions. Then, the basic reproduction number $ \mathcal{R}_0 $ was calculated, and the disease-free equilibrium (DFE), denoted as $ E^0 $, was locally and globally asymptotically stable when $ \mathcal{R}_0 < 1 $. Further, there existed a unique endemic equilibrium (EE), denoted as $ E^* $, which was locally and globally asymptotically stable when $ \mathcal{R}_0 > 1 $ and certain additional conditions were satisfied. In addition, we showed that the disease was uniformly persistent. Finally, the visualization results of the numerical simulations illustrated that: The media coverage was shown to mitigate the AIDS transmission burden in the population by lowering the infection peak and the time required to reach it; a higher awareness conversion rate can effectively reduce the basic reproduction number $ \mathcal{R}_0 $ to curb the spread of AIDS.
Citation: Xiang Zhang, Tingting Zheng, Yantao Luo, Pengfei Liu. Analysis of a reaction-diffusion AIDS model with media coverage and population heterogeneity[J]. Electronic Research Archive, 2025, 33(1): 513-536. doi: 10.3934/era.2025024
Considering the influence of population heterogeneity, media coverage and spatial diffusion on disease transmission, this paper investigated an acquired immunodeficiency syndrome (AIDS) reaction-diffusion model with nonlinear incidence rates and media coverage. First, we discussed the positivity and boundedness of system solutions. Then, the basic reproduction number $ \mathcal{R}_0 $ was calculated, and the disease-free equilibrium (DFE), denoted as $ E^0 $, was locally and globally asymptotically stable when $ \mathcal{R}_0 < 1 $. Further, there existed a unique endemic equilibrium (EE), denoted as $ E^* $, which was locally and globally asymptotically stable when $ \mathcal{R}_0 > 1 $ and certain additional conditions were satisfied. In addition, we showed that the disease was uniformly persistent. Finally, the visualization results of the numerical simulations illustrated that: The media coverage was shown to mitigate the AIDS transmission burden in the population by lowering the infection peak and the time required to reach it; a higher awareness conversion rate can effectively reduce the basic reproduction number $ \mathcal{R}_0 $ to curb the spread of AIDS.

| [1] |
J.W. Curran, D.N. Lawrence, H. Jaffe, J. E. Kaplan, J. E. Kaplan, M. Chamberland, et al., Acquired immunodeficiency syndrome (AIDS) associated with transfusions, N. Engl. J. Med., 310 (1984), 69–75. https://doi.org/10.1016/s0196-0644(84)80541-7 doi: 10.1016/s0196-0644(84)80541-7

|
| [2] |
S. Ma, Y. Chen, X. Lai, G. Lan, Y. Ruan, Z. Shen, et al., Predicting the HIV/AIDS epidemic and measuring the effect of AIDS Conquering Project in Guangxi Zhuang Autonomous Region, PLoS One, 17 (2022), e0270525. https://doi.org/10.1371/journal.pone.0270525 doi: 10.1371/journal.pone.0270525
|
| [3] |
B. Mahato, B. K. Mishra, A. Jayswal, R. Chandra, A mathematical model on Acquired Immunodeficiency Syndrome, J. Egypt. Math. Soc., 22 (2014), 544–549. https://doi.org/10.1016/j.joems.2013.12.001 doi: 10.1016/j.joems.2013.12.001
|
| [4] |
D. Gao, Z. Zou, B. Dong, W. Zhang, T. Chen, W. Cui, et al., Secular trends in HIV/AIDS mortality in China from 1990 to 2016: Gender disparities, PLoS One, 14 (2019), e0219689. https://doi.org/10.1371/journal.pone.0219689 doi: 10.1371/journal.pone.0219689
|
| [5] | WHO, HIV Data and Statistics, 2024. Available from: https://www.who.int/data/gho/data/themes/hiv-aids. |
| [6] |
R. M. Anderson, G. F. Medley, R. M. May, A. M. Johnson, A preliminary study of the transmission dynamics of the human immunodeficiency virus (HIV), the causative agent of AIDS, Math. Med. Biol.: J. IMA, 3 (1986), 229–263. https://doi.org/10.1093/imammb/3.4.229 doi: 10.1093/imammb/3.4.229
|
| [7] |
R. M. May, R. M. Anderson, The transmission dynamics of human immunodeficiency virus (HIV), Philos. Trans. R. Soc. London, Ser. B, 321 (1988), 565–607. https://doi.org/10.1098/rstb.1988.0108 doi: 10.1098/rstb.1988.0108
|
| [8] | R. M. Anderson, The role of mathematical models in the study of HIV transmission and the epidemiology of AIDS, J. Acquired Immune Deficiency, 1 (1988), 241–256. |
| [9] |
X. Zhai, W. Li, F. Wei, X. Mao, Dynamics of an HIV/AIDS transmission model with protection awareness and fluctuations, Chaos, Solitons Fractals, 169 (2023), 113224. https://doi.org/10.1016/j.chaos.2023.113224 doi: 10.1016/j.chaos.2023.113224
|
| [10] |
Z. Wang, Z. Yang, G. Yang, C. Zhang, Numerical analysis of age-structured HIV model with general transmission mechanism, Commun. Nonlinear Sci., 134 (2024), 108020. https://doi.org/10.1016/j.cnsns.2024.108020 doi: 10.1016/j.cnsns.2024.108020
|
| [11] |
L. Wang, A. Din, P. Wu, Dynamics and optimal control of a spatial diffusion HIV/AIDS model with antiretrovial therapy and pre‐exposure prophylaxis treatments, Math. Methods Appl. Sci., 45 (2022), 10136–10161. https://doi.org/10.1002/mma.8359 doi: 10.1002/mma.8359
|
| [12] |
A. Rathinasamy, M. Chinnadurai, S. Athithan, Analysis of exact solution of stochastic sex-structured HIV/AIDS epidemic model with effect of screening of infectives, Math. Comput. Simul., 179 (2021), 213–237. https://doi.org/10.1016/j.matcom.2020.08.017 doi: 10.1016/j.matcom.2020.08.017
|
| [13] |
S. Liu, D. Jiang, X. Xu, A. Alsaedi, T. Hayat, Dynamics of DS‐I‐A epidemic model with multiple stochastic perturbations, Math. Methods Appl. Sci., 41 (2018), 6024–6049. https://doi.org/10.1002/mma.5115 doi: 10.1002/mma.5115
|
| [14] |
H. He, Z. Ou, D. Yu, Y. Li, Y. Liang, W. He, et al., Spatial and temporal trends in HIV/AIDS burden among worldwide regions from 1990 to 2019: a secondary analysis of the global burden of disease study 2019, Front. Med., 9 (2022), 808318. https://doi.org/10.3389/fmed.2022.808318 doi: 10.3389/fmed.2022.808318
|
| [15] | P. Wu, Z. He, Modeling and analysis of a periodic delays spatial diffusion HIV model with three-stage infection process, Int. J. Biomath., 2023. https://doi.org/10.3389/10.21203/rs.3.rs-3057176/v1 |
| [16] |
Z. Chen, C. Dai, L. Shi, G. Chen, P. Wu, L. Wang, Reaction-diffusion model of HIV infection of two target cells under optimal control strategy, Electron. Res. Arch., 32 (2024), 4129–4163. https://doi.org/10.3934/era.2024186 doi: 10.3934/era.2024186
|
| [17] |
P. Wu, Global well-posedness and dynamics of spatial diffusion HIV model with CTLs response and chemotaxis, Math. Comput. Simul., 228 (2025), 402–417. https://doi.org/10.1016/j.matcom.2024.09.020 doi: 10.1016/j.matcom.2024.09.020
|
| [18] | C. Nouar, S. Bendoukha, S. Abdelmalek, The optimal control of an HIV/AIDS reaction-diffusion epidemic model, in 2021 International Conference on Recent Advances in Mathematics and Informatics (ICRAMI), IEEE, (2021), 1–5. https://doi.org/10.1109/ICRAMI52622.2021.9585972 |
| [19] |
P. Liu, Y. Luo, Z. Teng, Role of media coverage in a SVEIR-I epidemic model with nonlinear incidence and spatial heterogeneous environment, Math. Biosci. Eng., 20 (2023), 15641–15671. https://doi.org/10.1016/j.matcom.2024.09.020 doi: 10.1016/j.matcom.2024.09.020
|
| [20] |
J. Cui, Y. Sun, H. Zhu, The impact of media on the control of infectious diseases, J. Dyn. Differ. Equations, 20 (2008), 31–53. https://doi.org/10.1007/s10884-007-9075-0 doi: 10.1007/s10884-007-9075-0
|
| [21] |
Q. Yan, S. Tang, S. Gabriele, J. Wu, Media coverage and hospital notifications: correlation analysis and optimal media impact duration to manage a pandemic, J. Theor. Biol., 390 (2016), 1–13. https://doi.org/10.1016/j.jtbi.2015.11.002 doi: 10.1016/j.jtbi.2015.11.002
|
| [22] |
G. P. Sahu, J. Dhar, Dynamics of an SEQIHRS epidemic model with media coverage, quarantine and isolation in a community with pre-existing immunity, J. Math. Anal. Appl., 421 (2015), 1651–1672. https://doi.org/10.1016/j.jmaa.2014.08.019 doi: 10.1016/j.jmaa.2014.08.019
|
| [23] |
J. Gao, H. Fu, L. Lin, E. J. Nehl, F. Y. Wong, P. Zheng, Newspaper coverage of HIV/AIDS in China from 2000 to 2010, AIDS care, 25 (2013), 1174–1178. https://doi.org/10.1080/09540121.2012.752785 doi: 10.1080/09540121.2012.752785
|
| [24] |
Y. Wang, L. Hu, L. Nie, Dynamics of a hybrid HIV/AIDS model with age-structured, self-protection and media coverage, Mathematics, 11 (2022), 82. https://doi.org/10.3390/math11010082 doi: 10.3390/math11010082
|
| [25] |
R. H. Martin, H. L. Smith, Abstract functional-differential equations and reaction-diffusion systems, Trans. Am. Math. Soc., 321 (1990), 1–44. https://doi.org/10.1090/s0002-9947-1990-0967316-x doi: 10.1090/s0002-9947-1990-0967316-x
|
| [26] |
Z. Du, R. Peng, A priori $L^{\infty}$ estimates for solutions of a class of reaction-diffusion systems, J. Math. Biol., 72 (2016), 1429–1439. https://doi.org/10.1007/s00285-015-0914-z doi: 10.1007/s00285-015-0914-z
|
| [27] |
W. Wang, X. Zhao, Basic reproduction numbers for reaction-diffusion epidemic models, SIAM J. Appl. Dyn. Syst., 11 (2012), 1652–1673. https://doi.org/10.1137/120872942 doi: 10.1137/120872942
|
| [28] |
O. Diekmann, J. A. P. Heesterbeek, J. A. J. Metz, On the definition and the computation of the basic reproduction ratio $R_0$ in models for infectious diseases in heterogeneous populations, J. Math. Biol., 28 (1990), 365–382. https://doi.org/10.1007/bf00178324 doi: 10.1007/bf00178324
|
| [29] |
P. V. Driessche, J. Watmough, Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission, Math. Biosci., 180 (2002), 29–48. https://doi.org/10.1016/s0025-5564(02)00108-6 doi: 10.1016/s0025-5564(02)00108-6
|
| [30] | L. S. Hal, An introduction to the theory of competitive and cooperative systems, Math. Surv. Monogr., 41 (1995). |
| [31] |
L. Zhang, Z. Wang, Y. Zhang, Dynamics of a reaction–diffusion waterborne pathogen model with direct and indirect transmission, Comput. Math. Appl., 72 (2016), 202–215. https://doi.org/10.1016/j.camwa.2016.04.046 doi: 10.1016/j.camwa.2016.04.046
|
| [32] |
H. R. Thieme, Convergence results and a Poincaré-Bendixson trichotomy for asymptotically autonomous differential equations, J. Math. Biol., 30 (1992), 755–763. https://doi.org/10.1007/BF00173267 doi: 10.1007/BF00173267
|
| [33] |
Y. Luo, L. Zhang, Z. Teng, T. Zheng, Analysis of a general multi-group reaction–diffusion epidemic model with nonlinear incidence and temporary acquired immunity, Math. Comput. Simul., 182 (2021), 428–455. https://doi.org/10.1016/j.matcom.2020.11.002 doi: 10.1016/j.matcom.2020.11.002
|
| [34] |
Y. Lou, X. Zhang, A reaction–diffusion malaria model with incubation period in the vector population, J. Math. Biol., 62 (2011), 543–568. https://doi.org/10.1007/s00285-010-0346-8 doi: 10.1007/s00285-010-0346-8
|
Figures(4) / Tables(1)
Xiang Zhang, Tingting Zheng, Yantao Luo, Pengfei Liu. Analysis of a reaction-diffusion AIDS model with media coverage and population heterogeneity[J]. Electronic Research Archive, 2025, 33(1): 513-536. doi: 10.3934/era.2025024







 DownLoad:
DownLoad: