In the paper, the existence and uniqueness of the equilibrium point in the Cohen-Grossberg neural network (CGNN) are first studied. Additionally, a switched Cohen-Grossberg neural network (SCGNN) model with time-varying delay is established by introducing a switched system to the CGNN. Based on reducing the conservativeness of the system, a flexible terminal interpolation method is proposed. Using an adjustable parameter to divide the invariant time-delay interval into multiple adjustable terminal interpolation intervals $ (2^{\imath +1}-3) $, more moments when signals are transmitted slowly can be captured. To this end, a new Lyapunov-Krasovskii functional (LKF) is constructed, and the stability of SCGNN can be estimated. Using the LKF method, a quadratic convex inequality, linear matrix inequalities (LMIs) and ordinary differential equation theory, a new form of stability criterion is obtained and specific instances are given to prove the applicability of the new stability criterion.
Citation: Biwen Li, Yibo Sun. Stability analysis of Cohen-Grossberg neural networks with time-varying delay by flexible terminal interpolation method[J]. AIMS Mathematics, 2023, 8(8): 17744-17764. doi: 10.3934/math.2023906
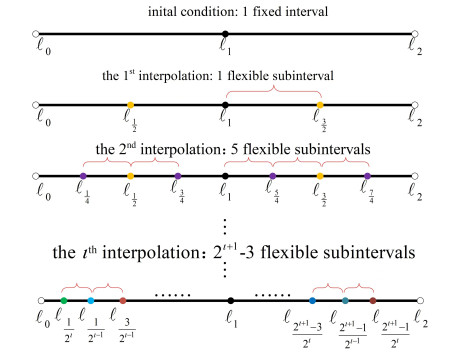
In the paper, the existence and uniqueness of the equilibrium point in the Cohen-Grossberg neural network (CGNN) are first studied. Additionally, a switched Cohen-Grossberg neural network (SCGNN) model with time-varying delay is established by introducing a switched system to the CGNN. Based on reducing the conservativeness of the system, a flexible terminal interpolation method is proposed. Using an adjustable parameter to divide the invariant time-delay interval into multiple adjustable terminal interpolation intervals $ (2^{\imath +1}-3) $, more moments when signals are transmitted slowly can be captured. To this end, a new Lyapunov-Krasovskii functional (LKF) is constructed, and the stability of SCGNN can be estimated. Using the LKF method, a quadratic convex inequality, linear matrix inequalities (LMIs) and ordinary differential equation theory, a new form of stability criterion is obtained and specific instances are given to prove the applicability of the new stability criterion.

| [1] | C. I. Byrnes, F. D. Priscoli, A. Isidori, Output regulation of uncertain nonlinear systems, Boston: Birkhäuser, 1997. https://doi.org/10.1007/978-1-4612-2020-6 |
| [2] |
Z. H. Yuan, L. H. Huang, D. W. Hu, B. W. Liu, Convergence of nonautonomous Cohen-Grossberg-type neural networks with variable delays, IEEE Trans. Neural Netw., 19 (2008), 140-147. https://doi.org/10.1109/TNN.2007.903154 doi: 10.1109/TNN.2007.903154

|
| [3] |
H. Ye, A. N. Michel, K. N. Wang, Qualitative analysis of Cohen-Grossberg neural networks with multiple delays, Phys. Rev. E, 51 (1995), 2611. https://doi.org/10.1103/PhysRevE.51.2611 doi: 10.1103/PhysRevE.51.2611
|
| [4] |
J. D. Cao, K. Yuan, H. X. Li, Global asymoptotical stability of recurrent neural networks with multiple discrete delays and distributed delays, IEEE Trans. Neural Netw., 17 (2006), 1646-1651. https://doi.org/10.1109/TNN.2006.881488 doi: 10.1109/TNN.2006.881488
|
| [5] |
C. X. Huang, L. H. Huang, Dynamics of a class of Cohen-Grossberg neural networks with time-varying delays, Nonlinear Anal. Real World Appl., 8 (2007), 40-52. https://doi.org/10.1016/j.nonrwa.2005.04.008 doi: 10.1016/j.nonrwa.2005.04.008
|
| [6] |
J. D. Cao, J. L. Liang, Boundedness and stability for Cohen-Grossberg neural networks with time-varying delays, J. Math. Anal. Appl., 296 (2004), 665-685. https://doi.org/10.1016/j.jmaa.2004.04.039 doi: 10.1016/j.jmaa.2004.04.039
|
| [7] |
L. Wan, Q. H. Zhou, Attractor and ultimate boundedness for stochastic cellular neural networks with delays, Nonlinear Anal. Real World Appl., 12 (2011), 2561-2566. https://doi.org/10.1016/j.nonrwa.2011.03.005 doi: 10.1016/j.nonrwa.2011.03.005
|
| [8] |
K. Yuan, J. D. Cao, H. X. Li, Robust stability of switched Cohen-Grossberg neural networks with mixed time-varying delays, IEEE Trans. Syst. Man Cybernet. Part B (Cybernet.), 36 (2006), 1356-1363. https://doi.org/10.1109/TSMCB.2006.876819 doi: 10.1109/TSMCB.2006.876819
|
| [9] |
H. B. Zeng, H. C. Lin, Y. He, K. L. Teo, W. Wang, Hierarchical stability conditions for time-varying delay systems via an extended reciprocally convex quadratic inequality, J. Franklin Inst., 357 (2020), 9930-9941. https://doi.org/10.1016/j.jfranklin.2020.07.034 doi: 10.1016/j.jfranklin.2020.07.034
|
| [10] |
H. Y. Zhang, Z. P. Qiu, X. Z. Liu, L. L. Xiong, Stochastic robust finite-time boundedness for semi-Markov jump uncertain neutral-type neural networks with mixed time-varying delays via a generalized reciprocally convex combination inequality, Int. J. Robust Nonlinear Control, 30 (2020), 2001-2019. https://doi.org/10.1002/rnc.4859 doi: 10.1002/rnc.4859
|
| [11] |
W. J. Lin, Y. He, M. Wu, Q. P. Liu, Reachable set estimation for Markovian jump neural networks with time-varying delay, Neural Netw., 108 (2018), 527-532. https://doi.org/10.1016/j.neunet.2018.09.011 doi: 10.1016/j.neunet.2018.09.011
|
| [12] |
W. Y. Duan, Stability switches in a Cohen-Grossberg neural network with multi-delays, Int. J. Biomath., 10 (2017), 1750075. https://doi.org/10.1142/S1793524517500759 doi: 10.1142/S1793524517500759
|
| [13] | D. Liberzon, Switching in system and control, Boston: Birkhäuser, 2003. https://doi.org/10.1007/978-1-4612-0017-8 |
| [14] |
J. Lian, K. Zhang, Exponential stability for switched Cohen-Grossberg neural networks with average dwell time, Nonlinear Dyn., 63 (2011), 331-343. https://doi.org/10.1007/s11071-010-9807-2 doi: 10.1007/s11071-010-9807-2
|
| [15] |
Z. G. Wu, P. Shi, H. Y. Su, J. Chu, Delay-dependent stability analysis for switched neural networks with time-verying delay, IEEE Trans. Syst. Man Cybernet. Part B (Cybernet.), 41 (2011), 1522-1530. https://doi.org/10.1109/TSMCB.2011.2157140 doi: 10.1109/TSMCB.2011.2157140
|
| [16] |
D. Liberzon, A. S. Morse, Basic problems in stability and design of switched systems, IEEE Control Syst. Mag., 19 (1999), 59-70. https://doi.org/10.1109/37.793443 doi: 10.1109/37.793443
|
| [17] |
Q. K. Song, J. Y. Zhang, Global exponential stability of impulsive Cohen-Grossberg neural network with time-varying delays, Nonlinear Anal. Real World Appl., 9 (2008), 500-510. https://doi.org/10.1016/j.nonrwa.2006.11.015 doi: 10.1016/j.nonrwa.2006.11.015
|
| [18] |
Q. T. Gan, Exponential synchronization of stochastic Cohen-Grossberg neural networks with mixed time-varying delays and reaction-diffusion via periodically intermittent control, Neural Netw., 31 (2012), 12-21. https://doi.org/10.1016/j.neunet.2012.02.039 doi: 10.1016/j.neunet.2012.02.039
|
| [19] |
M. H. Jiang, Y. Shen, X. X. Liao, Boundedness and global exponential stability for generalized Cohen-Grossberg neural networks with variable delay, Appl. Math. Comput., 172 (2006), 379-393. https://doi.org/10.1016/j.amc.2005.02.009 doi: 10.1016/j.amc.2005.02.009
|
| [20] |
L. G. Wan, A. L. Wu, Mittag-Leffler stability analysis of fractional-order fuzzy Cohen-Grossberg neural networks with deviating argument, Adv. Differ. Equ., 2017 (2017), 1-19. https://doi.org/10.1186/s13662-017-1368-y doi: 10.1186/s13662-017-1368-y
|
| [21] |
H. Q. Wu, G. H. Xu, C. Y. Wu, N. Li, K. W. Wang, Q. Q. Guo, Stability in switched Cohen-Grossberg neural networks with mixed time delays and non-Lipschitz activation functions, Discrete Dyn. Nat. Soc., 2012 (2012), 1-22. https://doi.org/10.1155/2012/435402 doi: 10.1155/2012/435402
|
| [22] |
B. Sun, Y. T. Cao, Z. Y. Guo, Z. Yan, S. P. Wen, Synchronization of discrete-time recurrent neural networks with time-varying delays via quantized sliding mode control, Appl. Math. Comput., 375 (2020), 125093. https://doi.org/10.1016/j.amc.2020.125093 doi: 10.1016/j.amc.2020.125093
|
| [23] | Z. S. Wang, Y. F. Tian, Stability analysis of recurrent neural networks with time-varying delay by flexible terminal interpolation method, IEEE Trans. Neural Netw. Learn. Syst., 2022. https://doi.org/10.1109/TNNLS.2022.3188161 |
| [24] |
H. G. Zhang, Z. W. Liu, G. B. Huang, Z. S. Wang, Novel weighting-delay-based stability criteria for recurrent neural networks with time-varying delay, IEEE Trans. Neural Netw., 21 (2010), 91-106. https://doi.org/10.1109/TNN.2009.2034742 doi: 10.1109/TNN.2009.2034742
|
| [25] |
Y. He, G. P. Liu, D. Rees, New delay-dependent stability criteria for neural networks with time-varying delay, IEEE Trans. Neural Netw., 18 (2007), 310-314. https://doi.org/10.1109/TNN.2006.888373 doi: 10.1109/TNN.2006.888373
|
| [26] |
M. N. A. Parlakçı, Robust stability of uncertain neutral systems: a novel augmented Lyapunov functional approach, IET Control Theory Appl., 1 (2007), 802-809. https://doi.org/10.1049/iet-cta:20050517 doi: 10.1049/iet-cta:20050517
|
| [27] |
C. Peng, Y. C. Tian, Delay-dependent robust stability criteria for uncertain systems with interval time-varying delay, J. Comput. Appl. Math., 214 (2008), 480-494. https://doi.org/10.1016/j.cam.2007.03.009 doi: 10.1016/j.cam.2007.03.009
|
| [28] |
T. Li, L. Guo, C. Y. Sun, C. Lin, Further result on delay-dependent stability criterion of neural networks with time-varying delays, IEEE Trans. Neural Netw., 19 (2008), 726-730. https://doi.org/10.1109/TNN.2007.914162 doi: 10.1109/TNN.2007.914162
|
| [29] |
S. Arik, Z. Orman, Global stability analysis of Cohen-Grossberg neural networks with time varying delays, Phys. Lett. A, 341 (2005), 410-421. https://doi.org/10.1016/j.physleta.2005.04.095 doi: 10.1016/j.physleta.2005.04.095
|
| [30] |
Z. Y. Dong, X. Wang, X. Zhang, A nonsingular M-matrix-based global exponential stability analysis of higher-order delayed discrete-time Cohen-Grossberg neural networks, Appl. Math. Comput., 385 (2020), 125401. https://doi.org/10.1016/j.amc.2020.125401 doi: 10.1016/j.amc.2020.125401
|
| [31] |
V. Singh, Improved global robust stability for interval-delayed Hopfield neural networks, Neural Process. Lett., 27 (2008), 257-265. https://doi.org/10.1007/s11063-008-9074-0 doi: 10.1007/s11063-008-9074-0
|
| [32] |
G. Bao, S. P. Wen, Z. G. Zeng, Robust stability analysis of interval fuzzy Cohen-Grossberg neural networks with piecewise constant argument of generalized type, Neural Netw., 33 (2012), 32-41. https://doi.org/10.1016/j.neunet.2012.04.003 doi: 10.1016/j.neunet.2012.04.003
|
| [33] |
G. Q. Tan, Z. S. Wang, Reachable set estimation of delayed Markovian jump neural networks based on an improved reciprocally convex inequality, IEEE Trans. Neural Netw. Learn. Syst., 33 (2022), 2737-2742. https://doi.org/10.1109/TNNLS.2020.3045599 doi: 10.1109/TNNLS.2020.3045599
|
| [34] |
Z. J. Zhang, X. Zhang, T. T. Yu, Global exponential stability of neutral-type Cohen-Grossberg neural networks with multiple time-varying neutral and discrete delays, Neurocomputing, 490 (2022), 124-131. https://doi.org/10.1016/j.neucom.2022.03.068 doi: 10.1016/j.neucom.2022.03.068
|






Figures(7) / Tables(1)

Biwen Li, Yibo Sun. Stability analysis of Cohen-Grossberg neural networks with time-varying delay by flexible terminal interpolation method[J]. AIMS Mathematics, 2023, 8(8): 17744-17764. doi: 10.3934/math.2023906







 DownLoad:
DownLoad: