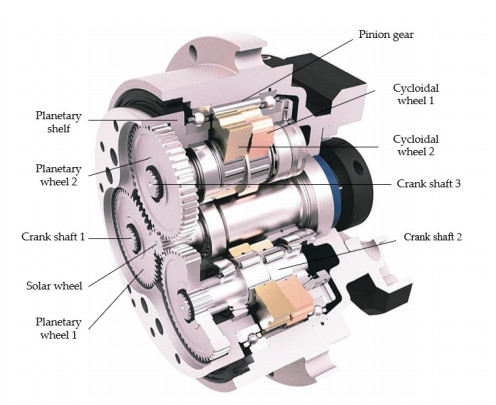
In order to overcome the low accuracy of traditional Extreme Learning Machine (ELM) network in the performance evaluation of Rotate Vector (RV) reducer, a pattern recognition model of ELM based on Ensemble Empirical Mode Decomposition (EEMD) fusion and Improved artificial Jellyfish Search (IJS) algorithm was proposed for RV reducer fault diagnosis. Firstly, it is theoretically proved that the torque transmission of RV reducer has periodicity during normal operation. The characteristics of data periodicity can be effectively reflected by using the test signal periodicity characteristics of rotating machinery and EEMD. Secondly, the Logistic chaotic mapping of population initialization in JS algorithm is replaced by tent mapping. At the same time, the competition mechanism is introduced to form a new IJS. The simulation results of standard test function show that the new algorithm has the characteristics of faster convergence and higher accuracy. The new algorithm was used to optimize the input layer weight of the ELM, and the pattern recognition model of IJS-ELM was established. The model performance was tested by XJTU-SY bearing experimental data set of Xi'an Jiaotong University. The results show that the new model is superior to JS-ELM and ELM in multi-classification performance. Finally, the new model is applied to the fault diagnosis of RV reducer. The results show that the proposed EEMD-IJS-ELM fault diagnosis model has higher accuracy and stability than other models.
Citation: Xiaoyan Wu, Guowen Ye, Yongming Liu, Zhuanzhe Zhao, Zhibo Liu, Yu Chen. Application of Improved Jellyfish Search algorithm in Rotate Vector reducer fault diagnosis[J]. Electronic Research Archive, 2023, 31(8): 4882-4906. doi: 10.3934/era.2023250
In order to overcome the low accuracy of traditional Extreme Learning Machine (ELM) network in the performance evaluation of Rotate Vector (RV) reducer, a pattern recognition model of ELM based on Ensemble Empirical Mode Decomposition (EEMD) fusion and Improved artificial Jellyfish Search (IJS) algorithm was proposed for RV reducer fault diagnosis. Firstly, it is theoretically proved that the torque transmission of RV reducer has periodicity during normal operation. The characteristics of data periodicity can be effectively reflected by using the test signal periodicity characteristics of rotating machinery and EEMD. Secondly, the Logistic chaotic mapping of population initialization in JS algorithm is replaced by tent mapping. At the same time, the competition mechanism is introduced to form a new IJS. The simulation results of standard test function show that the new algorithm has the characteristics of faster convergence and higher accuracy. The new algorithm was used to optimize the input layer weight of the ELM, and the pattern recognition model of IJS-ELM was established. The model performance was tested by XJTU-SY bearing experimental data set of Xi'an Jiaotong University. The results show that the new model is superior to JS-ELM and ELM in multi-classification performance. Finally, the new model is applied to the fault diagnosis of RV reducer. The results show that the proposed EEMD-IJS-ELM fault diagnosis model has higher accuracy and stability than other models.

| [1] | J. S. Shin, J. H. Kim, J. G. Kim, M. Jin, Development of a lifetime test bench for robot reducers for fault diagnosis and failure prognostics, J. Drive Control, 16 (2019), 33–41. |
| [2] |
H. An, W. Liang, Y. Zhang, J. Tan, Hidden Markov model based rotate vector reducer fault detection using acoustic emissions, Int. J. Sens. Netw., 32 (2020), 116–125. ttps://doi.org/10.1504/IJSNET.2020.104927 doi: 10.1504/IJSNET.2020.104927

|
| [3] |
L. Chen, H. Hu, Z. Zhang, X. Wang, Application of nonlinear output frequency response functions and deep learning to RV reducer fault diagnosis, IEEE Trans. Instrum. Meas., 70 (2020), 1–14. https://doi.org/10.1109/TIM.2020.3029383 doi: 10.1109/TIM.2020.3029383
|
| [4] |
A. Rohan, I. Raouf, H. S. Kim, Rotate vector (RV) reducer fault detection and diagnosis system: towards component level prognostics and health management (PHM), Sensors, 20 (2020), 6845. https://doi.org/10.3390/s20236845 doi: 10.3390/s20236845
|
| [5] |
S. Wang, J. Tan, J. Gu, D. Huang, Study on torsional vibration of RV reducer based on time-varying stiffness, J. Vib. Eng. Technol., 9 (2021), 73–84. https://doi.org/10.1007/s42417-020-00211-8 doi: 10.1007/s42417-020-00211-8
|
| [6] |
I. Raouf, H. Lee, H. S. Kim, Mechanical fault detection based on machine learning for robotic RV reducer using electrical current signature analysis: a data-driven approach, J. Comput. Des. Eng., 9 (2022), 417–433. https://doi.org/10.1093/jcde/qwac015 doi: 10.1093/jcde/qwac015
|
| [7] |
Q. Xu, C. Liu, E. Yang, M. Wang, An improved convolutional capsule network for compound fault diagnosis of RV reducers, Sensors, 22 (2022), 6442. https://doi.org/10.3390/s22176442 doi: 10.3390/s22176442
|
| [8] |
Y. He, H. Wang, S. Gu, New fault diagnosis approach for bearings based on parameter optimized VMD and genetic algorithm, J. Vibr. Shock, 40 (2021), 184–189. https://doi.org/10.13465/j.cnki.jvs.2021.06.025 doi: 10.13465/j.cnki.jvs.2021.06.025
|
| [9] |
Z. Huang, Y. C. Liu, R. J. Liao, X. J. Cao, Thermal error modeling of numerical control machine tools based on neural network neural network by optimized SSO algorithm, J. Northeast. Univ. (Nat. Sci.), 42 (2021), 1569–1578. https://doi.org/10.12068/j.issn.1005-3026.2021.11.008 doi: 10.12068/j.issn.1005-3026.2021.11.008
|
| [10] |
Z. Zhu, Y. Lei, G. Qi, Y. Chai, N. Mazur, Y. An, et al., A review of the application of deep learning in intelligent fault diagnosis of rotating machinery, Measurement, 206 (2022), 112346. https://doi.org/10.1016/j.measurement.2022.112346 doi: 10.1016/j.measurement.2022.112346
|
| [11] |
X. Huang, G. Qi, N. Mazur, Y. Chai, Deep residual networks-based intelligent fault diagnosis method of planetary gearboxes in cloud environments, Simul. Modell. Pract. Theory, 116 (2022), 102469. https://doi.org/10.1016/j.simpat.2021.102469 doi: 10.1016/j.simpat.2021.102469
|
| [12] |
F. He, Q. Ye, A bearing fault diagnosis method based on wavelet packet transform and convolutional neural network optimized by simulated annealing algorithm, Sensors, 22 (2022), 1410. https://doi.org/10.3390/s22041410 doi: 10.3390/s22041410
|
| [13] |
F. An, J. Wang, Rolling bearing fault diagnosis algorithm using overlapping group sparse-deep complex convolutional neural network, Nonlinear Dyn., 108 (2022), 2353–2368. https://doi.org/10.1007/s11071-022-07314-9 doi: 10.1007/s11071-022-07314-9
|
| [14] |
K. Sharma, D. Goyal, R. Kanda, Intelligent fault diagnosis of bearings based on convolutional neural network using infrared thermography, Proc. Inst. Mech. Eng., Part J: J. Eng. Tribol., 236 (2022), 2439–2446. https://doi.org/10.1177/13506501221082746 doi: 10.1177/13506501221082746
|
| [15] |
H. Wang, W. Jing, Y. Li, H. Yang, Fault diagnosis of fuel system based on improved extreme learning machine, Neural Process. Lett., 53 (2021), 2553–2565. https://doi.org/10.1007/s11063-019-10186-7 doi: 10.1007/s11063-019-10186-7
|
| [16] |
B. H. Liu, M. M. Wang, Switch machine based on wavelet energy spectrum entropy and improved ELM fault prediction, J. Yunnan Univ. (Nat. Sci. Ed.), 44 (2022), 497–504. https://doi.org/10.7540/j.ynu.20210174 doi: 10.7540/j.ynu.20210174
|
| [17] |
X. L. Ge, X. Zhang, Bearing fault diagnosis method using singular energy spectrum and improved ELM, J. Electr. Mach. Control, 25 (2021), 80–87. https://doi.org/10.15938/j.emc.2021.05.010 doi: 10.15938/j.emc.2021.05.010
|
| [18] |
V. K. Rayi, S. P. Mishra, J. Naik, P. K. Dash, Adaptive VMD based optimized deep learning mixed kernel ELM autoencoder for single and multistep wind power forecasting, Energy, 244 (2022), 122585. https://doi.org/10.1016/j.energy.2021.122585 doi: 10.1016/j.energy.2021.122585
|
| [19] |
J. S. Chou, D. N. Truong, A novel metaheuristic optimizer inspired by behavior of jellyfish in ocean, Appl. Math. Comput., 389 (2021), 125535. https://doi.org/10.1016/j.amc.2020.125535 doi: 10.1016/j.amc.2020.125535
|
| [20] |
Z. Zhao, G. Ye, Y. Liu, Z. Zhang, Recognition of fault state of RV reducer based on self-organizing feature map neural network, J. Phys. Conf. Ser., 1986 (2021), 012086. https://doi.org/10.1088/1742-6596/1986/1/012086 doi: 10.1088/1742-6596/1986/1/012086
|
| [21] | L. G. Kong, Analysis Research in Reducer Fault Diagnosis Based on Fault Tree Method, Master's thesis, Dalian University of Technology in Dalian, 2018. |
| [22] |
J. F. Yu, S. Liu, F. F. Han, Z. Y. Xiao, Antlion optimization algorithm based on Cauchy variation (in Chinese), Microelectron. Comput., 36 (2019), 45–49+54. https://doi.org/10.19304/j.cnki.issn1000-7180.2019.06.010 doi: 10.19304/j.cnki.issn1000-7180.2019.06.010
|
| [23] | Y. B. Wang, Research and Application of the Distance-Based Ant Lion Optimizer, Master's thesis, Hunan University in Hunan, 2017. |
| [24] | R. C. Eberhart, Y. Shi, Comparing inertia weights and constriction factors in particle swarm optimization, in Proceedings of the 2000 Congress on Evolutionary Computation, 1 (2000), 84–88. https://doi.org/10.1109/CEC.2000.870279 |
| [25] |
Z. Wu, N. E. Huang, Ensemble empirical mode decomposition: a noise-assisted data analysis method, Adv. Adapt. Data Anal., 1 (2009), 1–41. https://doi.org/10.1142/S1793536909000047 doi: 10.1142/S1793536909000047
|
| [26] |
J. M. Chen, Z. C. Liang, Research on speech enhancement algorithm based on EEMD data preprocessing and DNN, J. Ordnance Equip. Eng., 40 (2019), 96–103. https://doi.org/10.11809/bqzbgcxb2019.06.021 doi: 10.11809/bqzbgcxb2019.06.021
|
| [27] |
Y. J. Wang, S. Q. Kang, Y. Zhang, X. Liu, Y. C. Jiang, V. I. Mikulovich, Condition recognition method of rolling bearing based on ensemble empirical mode decomposition sensitive intrinsic mode function selection algorithm, J. Electron. Inf. Technol., 36 (2014), 595–600. https://doi.org/10.3724/SP.J.1146.2013.00434 doi: 10.3724/SP.J.1146.2013.00434
|
| [28] |
G. B. Huang, Q. Y. Zhu, C. K. Siew, Extreme learning machine: theory and applications, Neurocomputing, 70 (2006), 489–501. https://doi.org/10.1016/j.neucom.2005.12.126 doi: 10.1016/j.neucom.2005.12.126
|
| [29] |
B. Wang, Y. Lei, N. P. Li, N. B. Li, A hybrid prognostics approach for estimating remaining useful life of rolling element bearings, IEEE Trans. Reliab., 69 (2018), 401–412. https://doi.org/10.1109/TR.2018.2882682 doi: 10.1109/TR.2018.2882682
|
| [30] | Y. G. Yang, Research on Rolling Bearing Fault Diagnosis Method Based on Neural Network and Support Vector Machine, Master's thesis, Lanzhou Jiaotong University in Lanzhou, 2021. |















Figures(16) / Tables(10)
Xiaoyan Wu, Guowen Ye, Yongming Liu, Zhuanzhe Zhao, Zhibo Liu, Yu Chen. Application of Improved Jellyfish Search algorithm in Rotate Vector reducer fault diagnosis[J]. Electronic Research Archive, 2023, 31(8): 4882-4906. doi: 10.3934/era.2023250







 DownLoad:
DownLoad: