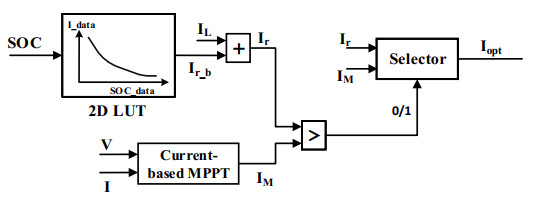
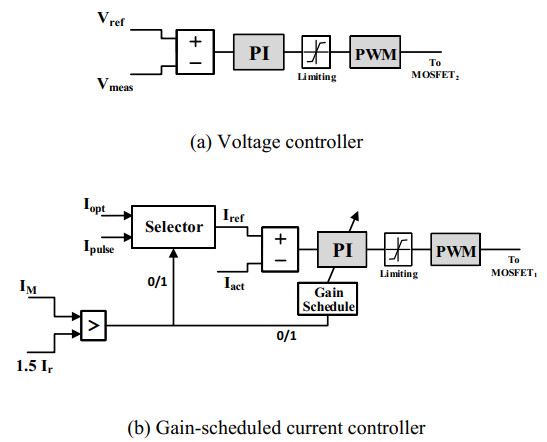
Li-ion batteries can be charged with different techniques according to the charging time and required capacity usage. Most charging techniques face difficulties when implemented in PV systems due to the intermittent and unpredictable nature of the power supply. This paper addresses the issue of determining the appropriate charging technique for Li-ion batteries in a PV system. We have developed a mode-selective control approach that determines the optimal charging mode according to the given SOC and solar irradiation, aiming to maximize the utilization of the generated PV power. The developed control approach has been implemented using a dual-switched buck converter in the MATLAB/Simulink environment. The key control algorithm focused on regulating current, with different references being used based on the selected charging mode. Three references for charging current were set: the maximum current, the required current assigned based on the given SOC, and the pulsed current. The pulsed current reference was employed during a stage of the charging process to accelerate charging and prevent dissipation of PV power. Furthermore, a gain-scheduled controller with carefully picked control parameters was used to ensure stable operation across different modes. The results proved the effectiveness of the proposed control in reducing charging time and minimizing PV power dissipation without resorting to the use of harmful charging currents.
Citation: Rasool M. Imran, Kadhim Hamzah Chalok. Innovative mode selective control and parameterization for charging Li-ion batteries in a PV system[J]. AIMS Energy, 2024, 12(4): 822-839. doi: 10.3934/energy.2024039
Li-ion batteries can be charged with different techniques according to the charging time and required capacity usage. Most charging techniques face difficulties when implemented in PV systems due to the intermittent and unpredictable nature of the power supply. This paper addresses the issue of determining the appropriate charging technique for Li-ion batteries in a PV system. We have developed a mode-selective control approach that determines the optimal charging mode according to the given SOC and solar irradiation, aiming to maximize the utilization of the generated PV power. The developed control approach has been implemented using a dual-switched buck converter in the MATLAB/Simulink environment. The key control algorithm focused on regulating current, with different references being used based on the selected charging mode. Three references for charging current were set: the maximum current, the required current assigned based on the given SOC, and the pulsed current. The pulsed current reference was employed during a stage of the charging process to accelerate charging and prevent dissipation of PV power. Furthermore, a gain-scheduled controller with carefully picked control parameters was used to ensure stable operation across different modes. The results proved the effectiveness of the proposed control in reducing charging time and minimizing PV power dissipation without resorting to the use of harmful charging currents.

| [1] |
Morsy N, Gaber M, Chaves-Ávila JP, et al. (2022) Automatic generation control of a future multisource power system considering high renewables penetration and electric vehicles: Egyptian power system in 2035. IEEE Access 10: 51662‒51681. https://doi.org/10.1109/ACCESS.2022.3174080 doi: 10.1109/ACCESS.2022.3174080

|
| [2] |
Sarvi M, Azadian A (2022) A comprehensive review and classified comparison of MPPT algorithms in PV systems. Energy Syst 13: 281‒320. https://doi.org/10.1007/s12667-021-00427-x doi: 10.1007/s12667-021-00427-x
|
| [3] |
Katche ML, Makokha AB, Zachary SO, et al. (2023) A comprehensive review of maximum power point tracking (MPPT) techniques used in solar PV systems. Energies 16: 2206. https://doi.org/10.3390/en16052206 doi: 10.3390/en16052206
|
| [4] |
Li C, Zhu CX, Zhang N, et al. (2022) Free vibration of self-powered nanoribbons subjected to thermal-mechanical-electrical fields based on a nonlocal strain gradient theory. Appl Math Model 110: 583‒602. https://doi.org/10.1016/j.apm.2022.05.044 doi: 10.1016/j.apm.2022.05.044
|
| [5] |
Ni J, Xiang J (2023) A concise control method based on spatial-domain dp/dv calculation for MPPT/power reserved of PV systems. IEEE Trans Energy Convers 38: 3‒14. https://doi.org/10.1109/TEC.2022.3195565 doi: 10.1109/TEC.2022.3195565
|
| [6] |
Jately V, Azzopardi B, Joshi J, et al. (2021) Experimental analysis of hill-climbing MPPT algorithms under low irradiance levels. Renewable Sustainable Energy Rev 150: 111467. https://doi.org/10.1016/j.rser.2021.111467 doi: 10.1016/j.rser.2021.111467
|
| [7] |
Ali AIM, Mohamed HRA (2022) Improved P&O MPPT algorithm with efficient open-circuit voltage estimation for two-stage grid-integrated PV system under realistic solar radiation. Int J Electr Power Energy Syst 137: 107805. https://doi.org/10.1016/j.ijepes.2021.107805 doi: 10.1016/j.ijepes.2021.107805
|
| [8] |
Hassan A, Bass O, Masoum MA (2023) An improved genetic algorithm based fractional open circuit voltage MPPT for solar PV systems. Energy Rep 9: 1535‒1548. https://doi.org/10.1016/j.egyr.2022.12.088 doi: 10.1016/j.egyr.2022.12.088
|
| [9] |
Fayrouz D (2023) Improved MPPT algorithm: Artificial neural network trained by an enhanced Gauss-Newton method. AIMS Electron Electr Eng 7: 380‒405. https://dx.doi.org/10.3934/electreng.2023020 doi: 10.3934/electreng.2023020
|
| [10] |
Sangrody R, Taheri S, Cretu AM, et al. (2023) An improved PSO-based MPPT technique using stability and steady state analyses under partial shading conditions. IEEE Trans Sustainable Energy 15: 136‒145. https://doi.org/10.1109/TSTE.2023.3274939 doi: 10.1109/TSTE.2023.3274939
|
| [11] |
Aly M, Rezk H (2022) An improved fuzzy logic control-based MPPT method to enhance the performance of PEM fuel cell system. Neural Comput Appl 34: 4555‒4566. https://doi.org/10.1007/s00521-021-06611-5 doi: 10.1007/s00521-021-06611-5
|
| [12] |
Yan HW, Farivar GG, Beniwal N, et al. (2023) Battery lifetime extension in a stand-alone microgrid with flexible power point tracking of photovoltaic system. IEEE J Emerg Sel Top Power Electron 11: 2281‒2290. https://doi.org/10.1109/JESTPE.2022.3212702 doi: 10.1109/JESTPE.2022.3212702
|
| [13] |
Yadav I, Sachan S, Maurya SK, et al. (2023) Effective battery charging system using step voltage and step duty size-based MPPT controller for solar PV system. Energy Rep 10: 744‒755. https://doi.org/10.1016/j.egyr.2023.07.033 doi: 10.1016/j.egyr.2023.07.033
|
| [14] |
Sorte PK, Panda KP, Panda G (2022) Current reference control based MPPT and investigation of power management algorithm for grid-tied solar PV-battery system. IEEE Syst J 16: 386‒396. https://doi.org/10.1109/JSYST.2021.3052959 doi: 10.1109/JSYST.2021.3052959
|
| [15] |
Chankaya M, Hussain I, Ahmad A, et al. (2021) Multi-objective grasshopper optimization based MPPT and VSC control of grid-tied PV-battery system. Electronics 10: 2770. https://doi.org/10.3390/electronics10222770 doi: 10.3390/electronics10222770
|
| [16] |
Jaga OP, GhatakChoudhuri S (2023) A smart control for self-reliant single-phase, grid-tied photovoltaic-battery storage system. Sustainable Energy Technol Assess 57: 103269. https://doi.org/10.1016/j.seta.2023.103269 doi: 10.1016/j.seta.2023.103269
|
| [17] |
Hasabelrasul H, Cai Z, Sun L, et al. (2022) Two-stage converter standalone PV-battery system based on VSG control. IEEE Access 10: 39825‒39832. https://doi.org/10.1109/ACCESS.2022.3165664 doi: 10.1109/ACCESS.2022.3165664
|
| [18] |
Yilmaz U, Kircay A, Borekci S (2018) PV system fuzzy logic MPPT method and PI control as a charge controller. Renewable Sustainable Energy Rev 81: 994‒1001. https://doi.org/10.1016/j.rser.2017.08.048 doi: 10.1016/j.rser.2017.08.048
|
| [19] |
Pathak PK, Yadav AK (2019) Design of battery charging circuit through intelligent MPPT using SPV system. Sol Energy 178: 79‒89. https://doi.org/10.1016/j.solener.2018.12.018 doi: 10.1016/j.solener.2018.12.018
|
| [20] |
Raiker GA, Loganathan U, Reddy SB (2021) Current control of boost converter for PV interface with momentum-based perturb and observe MPPT. IEEE Trans Ind Appl 57: 4071‒4079. https://doi.org/10.1109/TIA.2021.3081519 doi: 10.1109/TIA.2021.3081519
|
| [21] |
Arun S, Ahamed TI, Lakaparampil ZV, et al. (2022) An autonomous solar PV system using boost TPC for energy harvesting with mode-based power flow management control. Sustainable Energy Technol Assess 53: 102528. https://doi.org/10.1016/j.seta.2022.102528 doi: 10.1016/j.seta.2022.102528
|
| [22] |
Mahmood H, Blaabjerg F (2022) Autonomous power management of distributed energy storage systems in islanded microgrids. IEEE Trans Sustainable Energy 13: 1507‒1522. https://doi.org/10.1109/TSTE.2022.3156393 doi: 10.1109/TSTE.2022.3156393
|
| [23] |
Chtita S, Derouich A, El Ghzizal A, et al. (2021) An improved control strategy for charging solar batteries in off-grid photovoltaic systems. Sol Energy 220: 927‒941. https://doi.org/10.1016/j.solener.2021.04.003 doi: 10.1016/j.solener.2021.04.003
|
| [24] |
Traiki G, El Magri A, Lajouad R, et al. (2023) Multi-objective control and optimization of a stand-alone photovoltaic power conversion system with battery storage energy management. IFAC J Syst Control 26: 100227. https://doi.org/10.1016/j.ifacsc.2023.100227 doi: 10.1016/j.ifacsc.2023.100227
|
| [25] | Imran RM, Farhan BS, Yang YJ, et al. (2021) Comparative investigation of lithium-ion charging methods implemented via a single DC/DC converter. 5th International Conference on Green Energy and Applications (ICGEA), Singapore, 32‒37. https://doi.org/10.1109/ICGEA51694.2021.9487608 |
| [26] |
Viswa Teja A, Razia Sultana W, Salkuti SR (2023) Performance explorations of a PMS motor drive using an ANN-based MPPT controller for solar-battery powered electric vehicles. Designs 7: 79. https://doi.org/10.3390/designs7030079 doi: 10.3390/designs7030079
|
| [27] | Lee J (2015) Basic calculation of a buck converter's power stage. Richtek Technol Corp AN041: 1‒8. Available from: http://acots.info/pdf/an041_en.pdf. |
| [28] | Liu F, Kang Y, Zhang Y, et al. (2008) Comparison of P&O and hill climbing MPPT methods for grid-connected PV converter. 2008 3rd IEEE Conference on Industrial Electronics and Applications, Singapore, 804‒807. https://doi.org/10.1109/ICIEA.2008.4582626 |
| [29] | Mirbagheri SZ, Aldeen M, Saha S (2015) A comparative study of MPPT algorithms for standalone PV systems under RCIC. 2015 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Brisbane, Australia, 1‒5. https://doi.org/10.1109/APPEEC.2015.7380869 |
| [30] | Mohapatra A, Nayak B, Mohanty KB (2014) Current based novel adaptive P&O MPPT algorithm for photovoltaic system considering sudden change in the irradiance. 2014 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Mumbai, India, 1‒4. https://doi.org/10.1109/PEDES.2014.7042032 |
| [31] |
Imran RM, Li Q, Flaih FMF (2020) An enhanced lithium-ion battery model for estimating the state of charge and degraded capacity using an optimized extended kalman filter. IEEE Access 8: 208322‒208336. https://doi.org/10.1109/ACCESS.2020.3038477 doi: 10.1109/ACCESS.2020.3038477
|
| [32] |
Huang X, Li Y, Acharya AB, et al. (2020) A review of pulsed current technique for lithium-ion batteries. Energies 13: 2458. https://doi.org/10.3390/en13102458 doi: 10.3390/en13102458
|
Figures(11) / Tables(2)

Rasool M. Imran, Kadhim Hamzah Chalok. Innovative mode selective control and parameterization for charging Li-ion batteries in a PV system[J]. AIMS Energy, 2024, 12(4): 822-839. doi: 10.3934/energy.2024039







 DownLoad:
DownLoad: