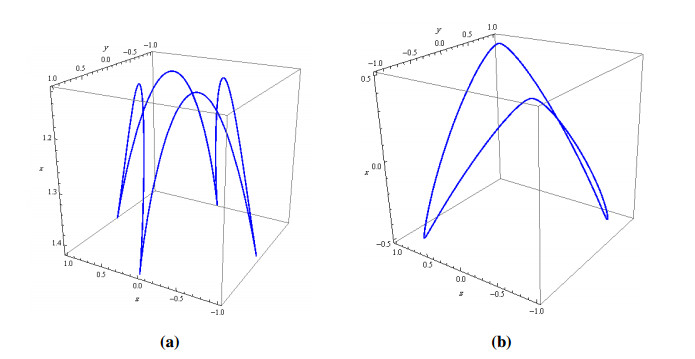
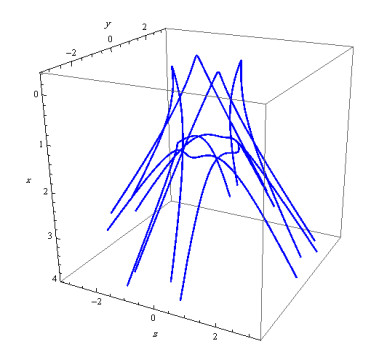
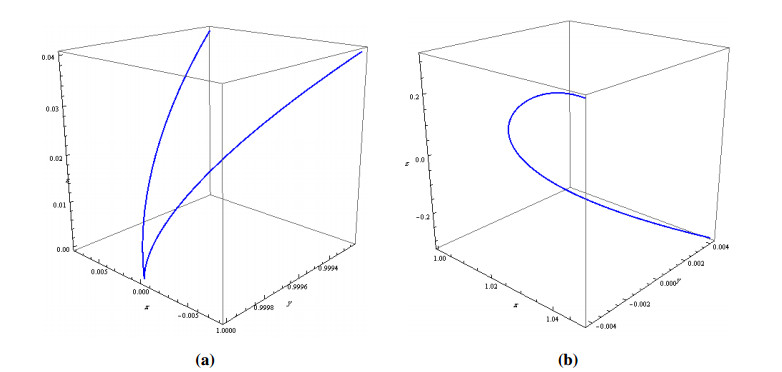
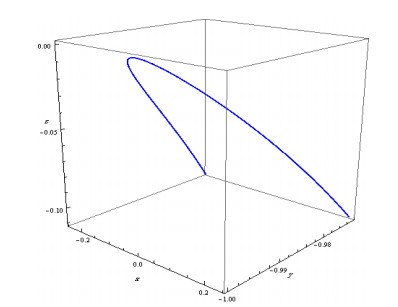
In this paper, we aim to investigate the equiform differential geometric properties of the evolute and involute frontal curves in the hyperbolic and de Sitter planes. We inspect the relevance between evolute and involute frontal curves that relate to symmetry properties. Also, under the viewpoint of symmetry, we expand these notions to the frontal curves. Moreover, we look at the classification of these curves and introduce the notion of frontalisation for its singularities. Finally, we provide two numerical examples with drawing as an application, through which we authenticate our theoretical results.
Citation: A. A. Abdel-Salam, M. I. Elashiry, M. Khalifa Saad. On the equiform geometry of special curves in hyperbolic and de Sitter planes[J]. AIMS Mathematics, 2023, 8(8): 18435-18454. doi: 10.3934/math.2023937
In this paper, we aim to investigate the equiform differential geometric properties of the evolute and involute frontal curves in the hyperbolic and de Sitter planes. We inspect the relevance between evolute and involute frontal curves that relate to symmetry properties. Also, under the viewpoint of symmetry, we expand these notions to the frontal curves. Moreover, we look at the classification of these curves and introduce the notion of frontalisation for its singularities. Finally, we provide two numerical examples with drawing as an application, through which we authenticate our theoretical results.

| [1] |
M. K. Saad, H. S. Abdel-Aziz, A. A. Abdel-Salam, Evolutes of fronts in de Sitter and hyperbolic spheres, Int. J. Anal. Appl., 20 (2022). https://doi.org/10.28924/2291-8639-20-2022-47 doi: 10.28924/2291-8639-20-2022-47

|
| [2] |
H. O. Yu, D. H. Pei, X. P. Cui, Evolutes of fronts on Euclidean 2-sphere, J. Nonlinear Sci. Appl., 8 (2015), 678–686. http://doi.org/10.22436/jnsa.008.05.20 doi: 10.22436/jnsa.008.05.20
|
| [3] | X. P. Cui, D. H. Pei, H. O. Yu, Evolutes of null torus fronts, J. Nonlinear Sci. Appl., 8 (2015), 866–876. |
| [4] |
L. Chen, M. Takahashi, Dualities and evolutes of fronts in hyperbolic and de Sitter space, J. Math. Anal. Appl., 437 (2016), 133–159. https://doi.org/10.1016/j.jmaa.2015.12.029 doi: 10.1016/j.jmaa.2015.12.029
|
| [5] |
A. A. Abdel-Salam, M. Khalifa Saad, Classification of evolutoids and pedaloids in Minkowski space-time plane, WSEAS Trans. Math., 20 (2021), 97–105. https://doi.org/10.37394/23206.2021.20.10 doi: 10.37394/23206.2021.20.10
|
| [6] |
H. S. Abdel-Aziz, M. K. Saad, A. A. Abdel-Salam, Some geometric invariants of pseudo-spherical evolutes in the hyperbolic 3-space, Comput. Mater. Con., 57 (2018), 389–415. http://doi.org/10.32604/cmc.2018.02149 doi: 10.32604/cmc.2018.02149
|
| [7] | H. S. Abdel-Aziz, M. K. Saad, A. A. Abdel-Salam, On involute-evolute curve couple in the hyperbolic and de Sitter spaces, J. Egyptian Math. Soc., 27 (2019), 25. |
| [8] |
Y. L. Li, O. O. Tuncer, On (contra)pedals and (anti)orthotomics of frontals in de Sitter 2-space, Math. Method. Appli. Sci., 46 (2023), 11157–111171. https://doi.org/10.1002/mma.9173 doi: 10.1002/mma.9173
|
| [9] |
Y. L. Li, M. Erdoğdu, A. Yavuz, Differential geometric approach of Betchow-Da rios soliton equation, Hacet. J. Math. Stat., 52 (2023), 114–125. https://doi.org/10.15672/hujms.1052831 doi: 10.15672/hujms.1052831
|
| [10] |
Y. L. Li, A. Abolarinwa, A. H. Alkhaldi, A. Ali, Some inequalities of hardy type related to witten-Laplace operator on smooth metric measure spaces, Mathematics, 10 (2022), 4580. https://doi.org/10.3390/math10234580 doi: 10.3390/math10234580
|
| [11] |
Y. L. Li, M. T. Aldossary, R. A. Abdel-Baky, Spacelike circular surfaces in Minkowski 3-space, Symmetry, 15 (2023), 173. https://doi.org/10.3390/sym15010173 doi: 10.3390/sym15010173
|
| [12] |
Y. L. Li, Z. Z. Chen, S. H. Nazra, R. A. Abdel-Baky, Singularities for timelike developable surfaces in Minkowski 3-space, Symmetry, 15 (2023), 277. https://doi.org/10.3390/sym15020277 doi: 10.3390/sym15020277
|
| [13] |
Y. L. Li, A. H. Alkhaldi, A. Ali, R. A. Abdel-Baky, M. K. Saad, Investigation of ruled surfaces and their singularities according to Blaschke frame in Euclidean 3-space, AIMS Mathematics, 8 (2023), 13875–13888. https://doi.org/10.3934/math.2023709 doi: 10.3934/math.2023709
|
| [14] |
Y. Y. Qian, D. S. Yu, Rates of approximation by neural network interpolation operators, Appl. Math. Comput., 418 (2022), 126781. https://doi.org/10.1016/j.amc.2021.126781 doi: 10.1016/j.amc.2021.126781
|
| [15] |
Y. L. Li, K. Eren, K. H. Ayvacı, S. Ersoy, The developable surfaces with pointwise 1-type Gauss map of Frenet type framed base curves in Euclidean 3-space, AIMS Mathematics, 8 (2023), 2226–2239. https://doi.org/10.3934/math.2023115 doi: 10.3934/math.2023115
|
| [16] |
G. S. Wang, D. Sh. Yu, L. M. Guan, Neural network interpolation operators of multivariate function, J. Comput. Anal. Math., 431 (2023), 115266. https://doi.org/10.1016/j.cam.2023.115266 doi: 10.1016/j.cam.2023.115266
|
| [17] |
Y. L. Li, D. Ganguly, Kenmotsu metric as conformal $\eta$-Ricci soliton, Mediterr. J. Math., 20 (2023), 193. https://doi.org/10.1007/s00009-023-02396-0 doi: 10.1007/s00009-023-02396-0
|
| [18] |
Y. L. Li, S. K. Srivastava, F. Mofarreh, A. Kumar, A. Ali, Ricci soliton of CR-Warped product manifolds and their classifications, Symmetry, 15 (2023), 976. https://doi.org/10.3390/sym15050976 doi: 10.3390/sym15050976
|
| [19] |
Y. L. Li, P. Laurian-Ioan, L. S. Alqahtani, A. H. Alkhaldi, A. Ali, Zermelo's navigation problem for some special surfaces of rotation, AIMS Mathematics, 8 (2023), 16278–16290. https://doi.org/10.3934/math.2023833 doi: 10.3934/math.2023833
|
| [20] | N. Gürbüz, Inextensible flows of curves in the equiform geometry of the simple isotropic space, Int. J. Math. Trends Technol., 4 (2013), 189–195. |
| [21] | M. E. Aydin, M. Ergüt, The equiform differential geometry of curves in 4-dimensional Galilean space $G_{4}$, Stud. Univ. Babeş-Bolyai Math., 58 (2013), 393–400. |
| [22] | Y. L. Li, A. A. Abdel-Salam, M. K. Saad, Primitivoids of curves in Minkowski plane, AIMS Mathematics, 8 (2023), 2386–2406. http://doi.org/2010.3934/math.2023123 |
| [23] | V. I. Arnold, S. M. Gusein-Zade, A. N. Varchenko, Singularities of Differentiable Maps, Boston: Birkha äuser, 1985. |
| [24] |
S. Izumiya, D. H. Pei, T. Sano, E. Torii, Evolutes of hyperbolic plane curves, Acta Math. Sinica, 20 (2004), 543–550. http://doi.org/10.1007/s10114-004-0301-y doi: 10.1007/s10114-004-0301-y
|
| [25] | J. W. Bruce, P. J. Giblin, Curves and singularities, A geometrical introduction to singularity theory, Cambridge: Cambridge University Press, 1992. |
| [26] |
T. Fukunaga, M. Takahashi, Existence and uniqueness for Legendre curves, J. Geom., 104 (2013), 297–307. http://doi.org/10.1007/s00022-013-0162-6 doi: 10.1007/s00022-013-0162-6
|
| [27] | Z. Erjavec, B. Divjak, D. Horvat, The general solutions of Frenet's system in the equiform geometry of the Galilean, pseudo-Galilean, simple isotropic and double isotropic $ space^{1} $, Int. Math. Forum., 6 (2011), 837–856. |
| [28] | Z. Erjavec, B. Divjak, The equiform differential geometry of curves in the pseudo-Galilean space, Math. Commun., 13 (2008), 321–332. |
| [29] | B. J. Pavković, I. Kamenarović, The equiform differential geometry of curves in the Galilean space $ G_{3} $, Glasnik Mat., 22 (1987), 449–457. |
| [30] | V. I. Arnold, Singularities of caustics and wave fronts, Dordrecht: Kluwer Academic Publishers, 1990. https://doi.org/10.1007/978-94-011-3330-2 |
| [31] |
T. Fukunaga, M. Takahashi, Evolutes of fronts in the Euclidean plane, J. Singul., 10 (2014), 92–107. http://doi.org/10.5427/jsing.2014.10f doi: 10.5427/jsing.2014.10f
|
| [32] | M. Turgut, S. Yilmaz, On the Frenet frame and a characterization of space-like involute-evolute curve couple in Minkowski space-time, Int. Math. Forum, 16 (2008), 793–801. |
| [33] | Y. L. Li, A. Gezer, E. Karakaş, Some notes on the tangent bundle with a Ricci quarter-symmetric metric connection, AIMS Mathematics, 8 (2023), 17335–17353. http://doi.org/2010.3934/math.2023886 |
| [34] |
Y. L. Li, A. Caliskan, Quaternionic shape operator and rotation matrix on ruled surfaces, Axioms, 12 (2023), 486. https://doi.org/10.3390/axioms12050486 doi: 10.3390/axioms12050486
|
Figures(4)

A. A. Abdel-Salam, M. I. Elashiry, M. Khalifa Saad. On the equiform geometry of special curves in hyperbolic and de Sitter planes[J]. AIMS Mathematics, 2023, 8(8): 18435-18454. doi: 10.3934/math.2023937







 DownLoad:
DownLoad: