Citation: Yu-Ying Wang, Ah-Fur Lai, Rong-Kuan Shen, Cheng-Ying Yang, Victor R.L. Shen, Ya-Hsuan Chu. Modeling and verification of an intelligent tutoring system based on Petri net theory[J]. Mathematical Biosciences and Engineering, 2019, 16(5): 4947-4975. doi: 10.3934/mbe.2019250

| [1] | H. K. Wu, S. W. Y. Lee, H. Y. Chang, et al., Current status, opportunities and challenges of augmented reality in education, Comput. Educ., 62 (2013), 41–49. |
| [2] | Y. B. Kim and S. Y. Rhee, Augmented reality on a deformable surface by considering self-occlusion and realistic illu, J. Internet Technol., 12 (2011), 733–740. |
| [3] | B. Koo and T. Shon, A structural health monitoring framework using 3D visualization and augmented reality in wireless sensor networks, J. Internet Technol., 11 (2010), 801–807. |
| [4] | G. Schall, E. Mendez, E. Kruijff, et al., Handheld augmented reality for underground infrastructure visualization, Pers. Ubiquit. Comput., 13 (2009), 281–291. |
| [5] | K. J. L. Nevelsteen, Virtual world, defined from a technological perspective and applied to video games, mixed reality, and the Metaverse, Comput. Animat. Virt. W., 29 (2017). |
| [6] | J. Luo, Q. Zhang, X. Chen, et al., Modeling and race detection of ladder diagrams via ordinary Petri nets, IEEE T. Syst., Man. Cy. S., 48 (2018), 1166–1176. |
| [7] | B. J. Boom, S. Orts-Escolano, X. X. Ning, et al., Interactive light source position estimation for augmented reality with an RGB-D camera, Comput. Animat. Virt. W., 28 (2017). |
| [8] | P. C. Xiong, Y. S. Fan and M. C. Zhou, A Petri net approach to analysis and composition of Web services, IEEE T. Syst. Man. Cy. A., 40 (2010), 376–387. |
| [9] | Y. Ru and C. N. Hadjicostis, Bounds on the number of markings consistent with label observations in Petri nets, IEEE T. Autom. Sci. Eng., 6 (2009), 334–344. |
| [10] | J. Rosell, Assembly and task planning using Petri nets: A survey, J. Eng. Manuf., 218 (2004), 987–994. |
| [11] | L. Li, Y. Ru and C. N. Hadjicostis, Least-cost firing sequence estimation in labeled Petri nets, Process of the 45th IEEE International Conference on Decision and Control, (2006), 416–421. |
| [12] | D. M. Xiang, G. J. Liu, C. G. Yan, et al., Detecting data-flow errors based on Petri nets with data operations, IEEE/CAA JAS, 5 (2018), 251–260. |
| [13] | T. Murata, Petri nets: properties, analysis, and applications, IEEE, 77 (1989), 541–580. |
| [14] | N. Wu and M. C. Zhou, System modeling and control with resource-oriented Petri nets, Int. J. Prod. Res., 49 (2011), 6585–6586. |
| [15] | WoPeD, Mar. 2017. Available from: http://woped.dhbw-karlsruhe.de/woped/. |
| [16] | F. Suro and Y. Ono, Japanese EFL learners' uses of text-to-speech technology and their learning behaviors: A pilot study, Process of the 2016 5th IIAI International Congress on Advanced Applied Informatics (IIAI-AAI), (2016), 296–301. |
| [17] | Y. Lee, S. Lee and S. H. Lee, Multifinger interaction between remote users in avatar-mediated telepresence, Comput. Animat. Virt. W., 28 (2017). |
| [18] | Speaker independent connected speech recognition-fifth generation computer corporation, May 2017. Available from: http://www.fifthgen.com/speaker-independent-connected-s-r.htm. |
| [19] | F. J. Yang, N. Q. Wu, Y. Qiao, et al., Polynomial approach to optimal one-wafer cyclic scheduling of treelike hybrid multi-cluster tools via Petri nets, IEEE/CAA JAS, 5 (2018), 270–280. |
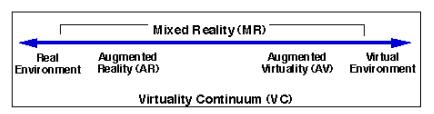
| [20] | P. Milgram and A. F. Kishino, Taxonomy of mixed reality visual displays, IEICE T. Inform. Syst., (1994), 1321–1329. |
| [21] | K. C. Li, C. W. Tsai, C. T. Chen, et al., The design of immersive English learning environment using augmented reality, Process of 8th IEEE International Conference on UMEDIA, (2015), 174–179. |
| [22] | C. S. C. Dalim, A. Dey and T. Piumsomboon, TeachAR: An interactive augmented reality tool for teaching basic English to non-native children, Process of IEEE International Symposium on Mixed and Augmented Reality Adjunct, (2016), 67–72. |
| [23] | F. Sorrentino, L. D. Spano and R. Scateni, Speaky notes learn languages with augmented reality, Process of IEEE International Conference Interactive Mobile Communication Technologies and Learning (IMCL), (2015), 56–61. |














Figures(33) / Tables(7)

Yu-Ying Wang, Ah-Fur Lai, Rong-Kuan Shen, Cheng-Ying Yang, Victor R.L. Shen, Ya-Hsuan Chu. Modeling and verification of an intelligent tutoring system based on Petri net theory[J]. Mathematical Biosciences and Engineering, 2019, 16(5): 4947-4975. doi: 10.3934/mbe.2019250







 DownLoad:
DownLoad: