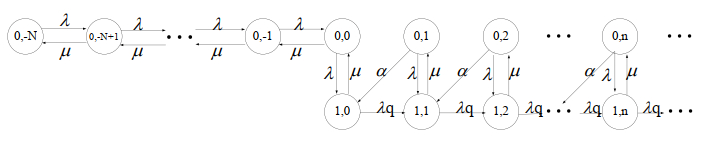
We examined a retrial make-to-stock system based on a double-ended queue. When the queue length was negative, the inventory system contained only products, and customers were waiting in the retrial queue when the queue length was positive. We developed a model to study the expected cost of the entire system with strategic customers in the observable case and the fully observable case. We also obtained the optimal inventory levels under these two levels of information based on numerical experiments.
Citation: Yuejiao Wang, Chenguang Cai. Equilibrium strategies of customers and optimal inventory levels in a make-to-stock retrial queueing system[J]. AIMS Mathematics, 2024, 9(5): 12211-12224. doi: 10.3934/math.2024596
We examined a retrial make-to-stock system based on a double-ended queue. When the queue length was negative, the inventory system contained only products, and customers were waiting in the retrial queue when the queue length was positive. We developed a model to study the expected cost of the entire system with strategic customers in the observable case and the fully observable case. We also obtained the optimal inventory levels under these two levels of information based on numerical experiments.

| [1] |
G. Arivarignan, M. Keerthana, B. Sivakumar, A production inventory system with renewal and retrial demands, Appl. Pro. Sto. Process., (2020), 129–142. https://doi.org/10.1007/978-981-15-5951-8_9 doi: 10.1007/978-981-15-5951-8_9

|
| [2] |
N. H. Do, T. VanDo, A. Melikov, Equilibrium customer behavior in the M/M/1 retrial queue with working vacations and a constant retrial rate, Oper. Res. Ger., 20 (2020), 627–646. https://doi.org/10.1007/s12351-017-0369-7 doi: 10.1007/s12351-017-0369-7
|
| [3] |
A. Economou, S. Kanta, Equilibrium customer strategies and social-profit maximization in the single‐server constant retrial queue, Nav. Res. Log., 58 (2011), 107–122. https://doi.org/10.1002/nav.20444 doi: 10.1002/nav.20444
|
| [4] |
S. Gao, H. Dong, X. Wang, Equilibrium and pricing analysis for an unreliable retrial queue with limited idle period and single vacation, Oper. Res. Ger., 21 (2021), 621–643. https://doi.org/10.1007/s12351-018-0437-7 doi: 10.1007/s12351-018-0437-7
|
| [5] |
K. Jeganathan, T. Harikrishnan, K. P. Lakshmi, D. Nagarajan, A multi-server retrial queueing-inventory system with asynchronous multiple vacations, Dec. Anal. J., 9 (2023), 100333. https://doi.org/10.1016/j.dajour.2023.100333 doi: 10.1016/j.dajour.2023.100333
|
| [6] |
K. Jeganathan, M. A. Reiyas, S. Selvakumar, N. Anbazhagan, Analysis of retrial queueing-inventory system with stock dependent demand rate: (s, S) versus (s, Q) ordering policies, Int. J. Appl. Comput. Math., 6 (2020), 1–29. https://doi.org/10.1007/s40819-020-00856-9 doi: 10.1007/s40819-020-00856-9
|
| [7] |
K. P. Jose, P. Beena, On a retrial production inventory system with vacation and multiple servers, Int. J. Appl. Comput. Math., 6 (2020), 108. https://doi.org/10.1007/s40819-020-00862-x doi: 10.1007/s40819-020-00862-x
|
| [8] |
K. P. Jose, S. S. Nair, Analysis of two production inventory systems with buffer, retrials and different production rates, J. Indust. Eng. Int., 13 (2017), 369–380. https://doi.org/10.1007/s40092-017-0191-0 doi: 10.1007/s40092-017-0191-0
|
| [9] |
K. P. Jose, P. S. Reshmi, A production inventory model with deteriorating items and retrial demands, Opsearch, 58 (2021), 71–82. https://doi.org/10.1007/s12597-020-00471-8 doi: 10.1007/s12597-020-00471-8
|
| [10] |
Y. Kerner, O. Shmuel-Bittner, Strategic behavior and optimization in a hybrid M/M/1 queue with retrials, Que. Syst., 96 (2020), 285–302. https://doi.org/10.1007/s11134-020-09672-w doi: 10.1007/s11134-020-09672-w
|
| [11] |
Q. Li, P. Guo, C. L. Li, J. S. Song, Equilibrium joining strategies and optimal control of a make-to-stock queue, Prod. Oper. Manag., 25 (2016), 1513–1527. https://doi.org/10.1111/poms.12565 doi: 10.1111/poms.12565
|
| [12] |
K. Li, J. Wang, Equilibrium balking strategies in the single-server retrial queue with constant retrial rate and catastrophes, Qual. Technol. Quant. M., 18 (2021), 156–178. https://doi.org/10.1080/16843703.2020.1760464 doi: 10.1080/16843703.2020.1760464
|
| [13] |
Z. Meng, L. Liu, X. Chai, Z. Wang, Equilibrium strategies in a constant retrial queue with setup time and the N-policy, Commum. Stat.-Theory M., 49 (2020), 1695–1711. https://doi.org/10.1080/03610926.2019.1565779 doi: 10.1080/03610926.2019.1565779
|
| [14] | C. $\ddot{O}$z, F. Karaesmen, On a production/inventory system with strategic customers and unobservable inventory levels, SMMSO, 2015,161. |
| [15] |
M. A. Reiyas, K. Jeganathan, A classical retrial queueing inventory system with two component demand rate, Int. J. Operat. Res., 74 (2023), 508–533. https://doi.org/10.1504/IJOR.2023.132813 doi: 10.1504/IJOR.2023.132813
|
| [16] |
A. Krishnamoorthy, D. Shajin, Stochastic decomposition in retrial queueing-inventory system, RAIRO-Oper. Res., 54 (2020), 88–91. https://doi.org/10.1145/3016032.3016043 doi: 10.1145/3016032.3016043
|
| [17] |
X. Shi, L. Liu, Equilibrium joining strategies in the retrial queue with two classes of customers and delayed vacations, Methodol. Comput. Appl., 25 (2023), 1–27. https://doi.org/10.1007/s11009-023-10029-y doi: 10.1007/s11009-023-10029-y
|
| [18] |
J. Wang, F. Zhang, Strategic joining in m/m/1 retrial queues, Eur. J. Oper. Res., 230 (2013), 76–87. https://doi.org/10.1016/j.ejor.2013.03.030 doi: 10.1016/j.ejor.2013.03.030
|
| [19] |
Z. Wang, L. Liu, Y. Q. Zhao, Equilibrium customer and socially optimal balking strategies in a constant retrial queue with multiple vacations and N-policy, J. Comb. Optim., 43 (2022), 870–908. https://doi.org/10.1007/s10878-021-00814-1 doi: 10.1007/s10878-021-00814-1
|
| [20] |
J. Wang, X. Zhang, P. Huang, Strategic behavior and social optimization in a constant retrial queue with the N-policy, Eur. J. Oper. Res., 256 (2017), 841–849. https://doi.org/10.1016/j.ejor.2016.06.034 doi: 10.1016/j.ejor.2016.06.034
|
| [21] |
Y. Zhang, Strategic behavior in the constant retrial queue with a single vacation, RAIRO-Oper. Res., 54 (2020), 569–583. https://doi.org/10.1051/ro/2019016 doi: 10.1051/ro/2019016
|
| [22] |
X. Zhang, J. Wang, Optimal inventory threshold for a dynamic service make-to-stock system with strategic customers, Appl. Stoch. Model. Bus., 35 (2019), 1103–1123. https://doi.org/10.1002/asmb.2454 doi: 10.1002/asmb.2454
|
| [23] |
Y. Zhang, J. Wang, Managing retrial queueing systems with boundedly rational customers, J. Oper. Res. Soc., 74 (2023), 748–761. https://doi.org/10.1080/01605682.2022.2053305 doi: 10.1080/01605682.2022.2053305
|




Figures(5) / Tables(3)

Yuejiao Wang, Chenguang Cai. Equilibrium strategies of customers and optimal inventory levels in a make-to-stock retrial queueing system[J]. AIMS Mathematics, 2024, 9(5): 12211-12224. doi: 10.3934/math.2024596







 DownLoad:
DownLoad: