In the present article, we give the distance spectrum of the zero divisor graphs of the commutative rings $ \mathbb{Z}_{t}[x]/\langle x^{4} \rangle $ ($ t $ is any prime), $ \mathbb{Z}_{t^2}[x] / \langle x^2 \rangle $ ($ t \geq 3 $ is any prime) and $ \mathbb{F}_{t}[u] / \langle u^3 \rangle $ ($ t $ is an odd prime), where $ \mathbb{Z}_{t} $ is an integer modulo ring and $ \mathbb{F}_{t} $ is a field. We calculated the inertia of these zero divisor graphs and established several sharp bounds for the distance energy of these graphs.
Citation: Fareeha Jamal, Muhammad Imran. Distance spectrum of some zero divisor graphs[J]. AIMS Mathematics, 2024, 9(9): 23979-23996. doi: 10.3934/math.20241166
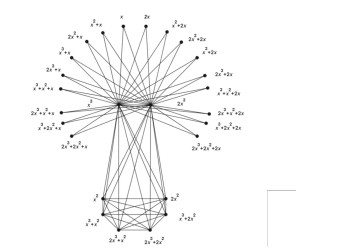
In the present article, we give the distance spectrum of the zero divisor graphs of the commutative rings $ \mathbb{Z}_{t}[x]/\langle x^{4} \rangle $ ($ t $ is any prime), $ \mathbb{Z}_{t^2}[x] / \langle x^2 \rangle $ ($ t \geq 3 $ is any prime) and $ \mathbb{F}_{t}[u] / \langle u^3 \rangle $ ($ t $ is an odd prime), where $ \mathbb{Z}_{t} $ is an integer modulo ring and $ \mathbb{F}_{t} $ is a field. We calculated the inertia of these zero divisor graphs and established several sharp bounds for the distance energy of these graphs.

| [1] |
A. A. H. Ahmadini, A. N. A. Koam, A. Ahmad, M. Bača, A. S. Feňovčíková, Computing vertex-based eccentric topological descriptors of zero-divisor graph associated with commutative rings, Math. Prob. Eng., 2020 (2020), 2056902. https://doi.org/10.1155/2020/2056902 doi: 10.1155/2020/2056902

|
| [2] | D. F. Anderson, P. S. Livingston, The zero-divisor graph of a commutative ring, J. Algebra, 217 (1999), 434–447. |
| [3] | D. F. Anderson, T. Asir, A. Badawi, T. T. Chelvam, Graphs from Rings, Switzerland: Springer, 2021. |
| [4] | N. Annamalai, On zero-divisor graph of the ring $ \mathbb{F}_p + u\mathbb{F}_p + u^2\mathbb{F}_p$, Commun. Comb. Optim., in press, 2023. https://doi.org/10.22049/cco.2023.28238.1486 |
| [5] |
M. Aouchiche, P. Hansen, Distance spectra of graphs: a survey, Linear Algebra Appl., 458 (2014), 301–386. https://doi.org/10.1016/j.laa.2014.06.010 doi: 10.1016/j.laa.2014.06.010
|
| [6] |
S. Barik, G. Sahoo, On the distance spectra of coronas, Linear Multil. Algebra, 65 (2017), 1617–1628. https://doi.org/10.1080/03081087.2016.1249448 doi: 10.1080/03081087.2016.1249448
|
| [7] | I. Beck, Coloring of commutative rings, J. Algebra, 116 (1988), 208–226. |
| [8] | P. Biler, A. Witkowski, Problems in Mathematical Analysis, Florida: Taylor & Francis Group, 1990. |
| [9] | D. Cvetković, P. Rowlinson, S. Simić, An Introduction to the Theory of Graph Spectra, London: London Mathematical Society, Cambridge University Press, 2010. |
| [10] |
S. Y. Cui, J. X. He, G. X. Tian, The generalized distance matrix, Linear Algebra Appl., 563 (2019), 1–23. https://doi.org/10.1016/j.laa.2018.10.014 doi: 10.1016/j.laa.2018.10.014
|
| [11] |
K. Elahi, A. Ahmad, R. Hasni, Construction algorithm for zero divisor graphs of finite commutative rings and their vertex-based eccentric topological indices, Mathematics, 6 (2018), 301. https://doi.org/10.3390/math6120301 doi: 10.3390/math6120301
|
| [12] | R. A. Horn, C. R. Johnson, Matrix Analysis, 2 Eds., Cambridge: Cambridge University Press, 2013. |
| [13] |
A. Ilic, Distance spectra and distance energy of integral circulant graphs, Linear Algebra Appl., 433 (2010), 1005–1014. https://doi.org/10.1016/j.laa.2010.04.034 doi: 10.1016/j.laa.2010.04.034
|
| [14] | G. Indulal, Distance spectrum of graph compositions, Ars Math. Contemp., 2 (2009), 93–100. |
| [15] | G. Indulal, I. Gutman, A. Vijayakumar, On distance energy of graphs, MATCH Commun. Math. Comput. Chem., 60 (2010), 461–472. |
| [16] |
C. Johnson, R. Sankar, Graph energy and topological descriptors of zero divisor graph associated with commutative ring, J. Appl. Math. Comput., 69 (2023), 2641–2656. https://doi.org/10.1007/s12190-023-01837-z doi: 10.1007/s12190-023-01837-z
|
| [17] |
A. N. A. Koam, A. Ahamad, A. Haider, On eccentric topological indices based on edges of zero divisor graphs, Symmetry, 11 (2019), 907. https://doi.org/10.3390/sym11070907 doi: 10.3390/sym11070907
|
| [18] | P. M. Magi, S. M. Jose, A. Kishore, Spectrum of the zero-divisor graph on the ring of integers modulo $ n $, J. Math. Comput. Sci., 5 (2020), 1643–1666. |
| [19] |
K. Mönius, Eigenvalues of zero-divisor graphs of finite commutative rings, J. Algebra Comb., 54 (2021), 787–802. https://doi.org/10.1007/s10801-020-00989-6 doi: 10.1007/s10801-020-00989-6
|
| [20] |
A. Mukhtar, R. Murtaza, S. U. Rehman, S. Usman, A. Q. Baig, Computing the size of zero divisor graphs, J. Inf. Optim. Sci., 41 (2020), 855–864. https://doi.org/10.1080/02522667.2020.1745378 doi: 10.1080/02522667.2020.1745378
|
| [21] | W. K. Nicholson, Introduction to Abstract Algebra, 4 Eds., New Jersey: John Wiley & Sons, 2012. |
| [22] | S. Pirzada, H. A. Ganie, B. A. Rather, R. U. Shaban, On generalized distance energy of graphs, Linear Algebra Appl., 603 (2020), 1–19. https://doi.org/10.1016/j.laa.2020.05.022 |
| [23] | B. A. Rather, A note on eigenvalues of zero divisor graphs associated with commutative rings, preprint paper, 2024. https://doi.org/10.48550/arXiv.2401.02554 |
| [24] |
B. A. Rather, M. Aijaz, F. Ali, N. Mlaiki, A. Ullah, On distance signless Laplacian eigenvalues of zero divisor graph of commutative rings, AIMS Math., 7 (2022), 12635–12649. http://dx.doi.org/10.3934/math.2022699 doi: 10.3934/math.2022699
|
| [25] |
C. J. Rayer, R. S. Jeyaraj, Wiener index and graph energy of zero divisor graph for commutative rings, Asian Eur. J. Math., 16 (2023), 2350211. https://doi.org/10.1142/S179355712350211X doi: 10.1142/S179355712350211X
|
| [26] |
C. J. Rayer, R. S. Jeyaraj, Applications on topological indices of zero-divisor graph associated with commutative rings, Symmetry, 15 (2023), 335. https://doi.org/10.3390/sym15020335 doi: 10.3390/sym15020335
|
| [27] | S. P. Redmond, The zero-divisor graph of a non-commutative ring, Int. J. Commut. Rings, 1 (2002), 203–211. |
| [28] |
P. Singh, V. K. Bhat, Adjacency matrix and Wiener index of zero divisor graph $\Gamma(\mathbb{Z}_{n})$, J. Appl. Math. Comput., 66 (2021), 717–732. https://doi.org/10.1007/s12190-020-01460-2 doi: 10.1007/s12190-020-01460-2
|
| [29] |
P. Singh, V. K. Bhat, Graph invariants of the line graph of zero divisor graph of $\mathbb{Z}_{n}$, J. Appl. Math. Comput., 68 (2022), 1271–1287. https://doi.org/10.1007/s12190-021-01567-0 doi: 10.1007/s12190-021-01567-0
|
| [30] |
D. Stevanovic, G. Indulal, The distance spectrum and energy of the compositions of regular graphs, Appl. Math. Lett., 22 (2009), 1136–1140. https://doi.org/10.1016/j.aml.2008.11.007 doi: 10.1016/j.aml.2008.11.007
|
| [31] |
G. X. Tian, Y. Li, S. Y. Cui, The change of distance energy of some special complete multipartite graphs due to edge deletion, Linear Algebra Appl., 584 (2020), 438–457. https://doi.org/10.1016/j.laa.2019.09.028 doi: 10.1016/j.laa.2019.09.028
|
| [32] |
Y. Yang, L. Sun, C. Bu, Bounds on the $\alpha$-distance energy and $\alpha$-distance estrada index of graphs, Discrete Dyn. Nat. Soc., 2020 (2020), 9393521. https://doi.org/10.1155/2020/9393521 doi: 10.1155/2020/9393521
|
| [33] |
M. Young, Adjacency matrices of zero-divisor graphs of integers modulo $ n $, Involve, 8 (2015), 753–761. https://doi.org/10.2140/involve.2015.8.753 doi: 10.2140/involve.2015.8.753
|
| [34] | B. Zhou, A. Ilic, On distance spectral radius and distance energy of graphs, MATCH Commun. Math. Comput. Chem., 64 (2010), 261–280. |


Figures(3)

Fareeha Jamal, Muhammad Imran. Distance spectrum of some zero divisor graphs[J]. AIMS Mathematics, 2024, 9(9): 23979-23996. doi: 10.3934/math.20241166







 DownLoad:
DownLoad: