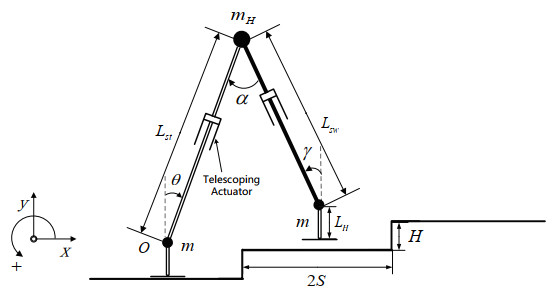
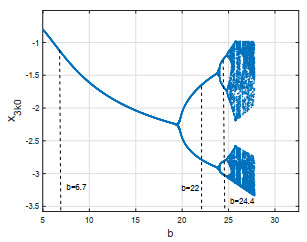
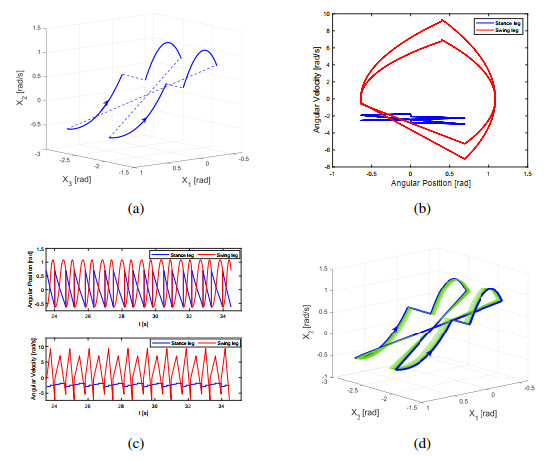
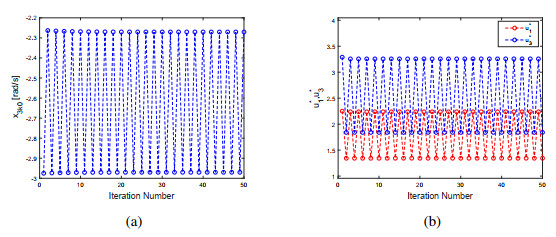
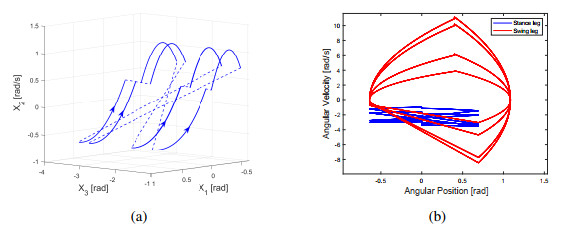
In this study, an ascending stair biped robot model with impulse thrust is presented. The biped robot contains a hip joint and two legs with massless telescoping actuator. Impulse thrust is applied at the ankle joint of robot's stance leg to simulate the forward push-off of the ankle during human walking. The nonlinear ascending stair biped model is linearized and a discrete map is obtained. The conditions for the existence and stability of period-1 gait are obtained by means of this discrete map. The expressions of torques to ensure robot walking are derived and Flip bifurcation is investigated. Numerical simulations, such as phase diagram of period-1, 2, 4 gaits and bifurcation diagram, are given in an example. Theoretical analysis and numerical results obtained in this study provide a theoretical basis for stable walking of ascending stair biped robot with periodic gaits.
Citation: Jiarui Chen, Aimin Tang, Guanfeng Zhou, Ling Lin, Guirong Jiang. Walking dynamics for an ascending stair biped robot with telescopic legs and impulse thrust[J]. Electronic Research Archive, 2022, 30(11): 4108-4135. doi: 10.3934/era.2022208
In this study, an ascending stair biped robot model with impulse thrust is presented. The biped robot contains a hip joint and two legs with massless telescoping actuator. Impulse thrust is applied at the ankle joint of robot's stance leg to simulate the forward push-off of the ankle during human walking. The nonlinear ascending stair biped model is linearized and a discrete map is obtained. The conditions for the existence and stability of period-1 gait are obtained by means of this discrete map. The expressions of torques to ensure robot walking are derived and Flip bifurcation is investigated. Numerical simulations, such as phase diagram of period-1, 2, 4 gaits and bifurcation diagram, are given in an example. Theoretical analysis and numerical results obtained in this study provide a theoretical basis for stable walking of ascending stair biped robot with periodic gaits.

| [1] |
T. McGeer, Passive dynamic walking, Int. J. Rob. Res., 9 (1990), 62–82. https://doi.org/10.1177/027836499000900206 doi: 10.1177/027836499000900206

|
| [2] |
S. Iqbal, X. Zang, Y. Zhu, J. Zhao, Bifurcations and chaos in passive dynamic walking, Rob. Auton. Syst., 62 (2014), 889–909. https://doi.org/10.1016/j.robot.2014.01.006 doi: 10.1016/j.robot.2014.01.006
|
| [3] |
B. Beigzadeh, S. Razavi, Dynamic walking analysis of an underactuated biped robot with asymmetric structure, Int. J. Humanoid Rob., 18 (2021), 2150014. https://doi.org/10.1142/S0219843621500146 doi: 10.1142/S0219843621500146
|
| [4] |
K. Deng, M. Zhao, W. Xu, Passive dynamic walking with a torso coupled via torsional springs, Int. J. Humanoid Rob., 14 (2017), 1650024. https://doi.org/10.1142/S0219843616500249 doi: 10.1142/S0219843616500249
|
| [5] |
K. Deng, M. Zhao, W. Xu, Level-ground walking for a bipedal robot with a torso via hip series elastic actuators and its gait bifurcation control, Rob. Auton. Syst., 79 (2016), 58–71. https://doi.org/10.1016/j.robot.2016.01.013 doi: 10.1016/j.robot.2016.01.013
|
| [6] |
D. Kerimoglu, O. Morgul, U. Saranli, Stability and control of planar compass gait walking with series-elastic ankle actuation, Trans. Inst. Meas. Control, 39 (2017), 312–323. https://doi.org/10.1177/0142331216663823 doi: 10.1177/0142331216663823
|
| [7] |
D. Maykranz, A. Seyfarth, Compliant ankle function results in landing-take off asymmetry in legged locomotion, J. Theor. Biol., 349 (2014), 44–49. https://doi.org/10.1016/j.jtbi.2014.01.029 doi: 10.1016/j.jtbi.2014.01.029
|
| [8] |
K. Zelik, T. Huang, P. Adamczyk, A. D. Kuo, The role of series ankle elasticity in bipedal walking, J. Theor. Biol., 346 (2014), 75–85. https://doi.org/10.1016/j.jtbi.2013.12.014 doi: 10.1016/j.jtbi.2013.12.014
|
| [9] |
T. Chen, J. Schmiedeler, B. Goodwine, Robustness and efficiency insights from a mechanical coupling metric for ankle-actuated biped robots, Auton. Robot., 44 (2020), 281–295. https://doi.org/10.1007/s10514-019-09893-w doi: 10.1007/s10514-019-09893-w
|
| [10] |
A. Kuo, Energetics of actively powered locomotion using the simplest walking model, J. Biomech. Eng., 124 (2002), 113–120. https://doi.org/10.1115/1.1427703 doi: 10.1115/1.1427703
|
| [11] |
Q. Ji, Z. Qian, L. Ren, L. Ren, Simulation analysis of impulsive ankle push-off on the walking speed of a planar biped robot, Front. Bioeng. Biotechnol., 8 (2021), 621560. https://doi.org/10.3389/fbioe.2020.621560 doi: 10.3389/fbioe.2020.621560
|
| [12] |
D. Hobbelen, M. Wisse, Ankle actuation for limit cycle walkers, Int. J. Rob. Res., 27 (2008), 709–735. https://doi.org/10.1177/0278364908091365 doi: 10.1177/0278364908091365
|
| [13] | B. Wu, D. Qin, Y. Chen, T. Cao, M. Wu, Structure design of an omni-directional wheeled handling robot, J. Phys. Conf. Ser., 1885 (2021), 052013. |
| [14] |
P. Huang, Z. Zhang, X. Luo, J. Zhang, P. Huang, Path tracking control of a differential-drive tracked robot based on look-ahead distance, IFAC-PapersOnLine, 51 (2018), 112–117. https://doi.org/10.1016/j.ifacol.2018.08.072 doi: 10.1016/j.ifacol.2018.08.072
|
| [15] |
Murshiduzzaman, T. Saleh, K. M. Raisuddin, Hexapod robot for autonomous machining, IOP Conf. Ser.: Mater. Sci. Eng., 488 (2019), 012003. https://doi.org/10.1088/1757-899X/488/1/012003 doi: 10.1088/1757-899X/488/1/012003
|
| [16] |
T. Sato, S. Sakaino, E. Ohashi, K. Ohnishi, Walking trajectory planning on stairs using virtual slope for biped robots, IEEE Trans. Ind. Electron., 58 (2011), 1385–1396. https://doi.org/10.1109/TIE.2010.2050753 doi: 10.1109/TIE.2010.2050753
|
| [17] |
C. Shih, Ascending and descending stairs for a biped robot, IEEE Trans. Syst. Man Cybern. Part A Syst. Humans, 29 (1999), 255–268. https://doi.org/10.1109/3468.759271 doi: 10.1109/3468.759271
|
| [18] | G. Figliolini, M. Ceccarelli, Climbing stairs with EP-WAR2 biped robot, in IEEE International Conference on Robotics and Automation, (2001), 4116–4121. https://doi.org/10.1109/ROBOT.2001.933261 |
| [19] |
G. Chen, J. Wang, L. Wang, Gait planning and compliance control of a biped robot on stairs with desired ZMP, IFAC Proc. Vol., 47 (2014), 2165–2170. https://doi.org/10.3182/20140824-6-ZA-1003.02341 doi: 10.3182/20140824-6-ZA-1003.02341
|
| [20] |
L. F. Cheng, K. Chen, Gait synthesis and sensory control of stair climbing for a humanoid robot, IEEE Trans. Ind. Electron., 55 (2008), 2111–2120. https://doi.org/10.1109/TIE.2008.921205 doi: 10.1109/TIE.2008.921205
|
| [21] |
M. Vatankhah, H. R. Kobravi, A. Ritter, Intermittent control model for ascending stair biped robot using a stable limit cycle model, Rob. Auton. Syst., 121 (2019), 103255. https://doi.org/10.1016/j.robot.2019.103255 doi: 10.1016/j.robot.2019.103255
|
| [22] | F. Asano, Z. W. Luo, S. Hyon, Parametric excitation mechanisms for dynamic bipedal walking, in IEEE International Conference on Robotics & Automation, (2006), 609–615. https://doi.org/10.1109/ROBOT.2005.1570185 |
| [23] |
S. Hasaneini, C. Macnab, J. Bertram, H. Leung, The dynamic optimization approach to locomotion dynamics: human-like gaits from a minimally-constrained biped model, Adv. Rob., 27 (2013), 845–859. https://doi.org/10.1080/01691864.2013.791656 doi: 10.1080/01691864.2013.791656
|
| [24] | J. S. Moon, M. W. Spong, Bifurcations and chaos in passive walking of a compass-gait biped with asymmetries, in IEEE International Conference on Robotics & Automation, (2010), 1721–1726. https://doi.org/10.1109/ROBOT.2010.5509856 |
| [25] |
H. Gritli, S. Belghith, Walking dynamics of the passive compass-gait model under OGY-based control:emergence of bifurcations and chaos, Commun. Nonlinear Sci. Numer. Simul., 47 (2017), 308–327. https://doi.org/10.1016/j.cnsns.2016.11.022 doi: 10.1016/j.cnsns.2016.11.022
|
| [26] |
M. Fathizadeh, S. Taghvaei, H. Mohammadi, Analyzing bifurcation, stability and chaos for a passive walking biped model with a sole foot, Int. J. Bifurcation Chaos, 28 (2018), 1850113. https://doi.org/10.1142/S0218127418501134 doi: 10.1142/S0218127418501134
|
| [27] |
X. Chen, Z. Jing, X. Fu, Chaos control in a pendulum system with excitations, Discrete Contin. Dyn. Syst. Ser. B, 20 (2015), 373–383. https://doi.org/10.3934/dcdsb.2015.20.373 doi: 10.3934/dcdsb.2015.20.373
|
| [28] |
W. Znegui, H. Gritli, S. Belghith, Design of an explicit expression of the Poincar map for the passive dynamic walking of the compass-gait biped model, Chaos Solitons Fractals, 130 (2020), 109436. https://doi.org/10.1016/j.chaos.2019.109436 doi: 10.1016/j.chaos.2019.109436
|
| [29] |
F. Asano, Stability analysis of underactuated compass gait based on linearization of motion, Multibody Syst. Dyn., 33 (2015), 93–111. https://doi.org/10.1007/s11044-014-9416-9 doi: 10.1007/s11044-014-9416-9
|
| [30] |
L. Li, Z. Xie, X. Luo, L. Li, Trajectory planning of flexible walking for biped robots using linear inverted pendulum model and linear pendulum model, Sensors, 21 (2021), 1082. https://doi.org/10.3390/s21041082 doi: 10.3390/s21041082
|
| [31] |
J. Ma, H. Jiang, Dynamics of a nonlinear differential advertising model with single parameter sales promotion strategy, Electron. Res. Arch., 30 (2022), 1142–1157. https://doi.org/10.3934/era.2022061 doi: 10.3934/era.2022061
|
| [32] |
X. Yang, J. Yu, H. Gao, An impulse control approach to spacecraft autonomous rendezvous based on genetic algorithms, Neurocomputing, 77 (2012), 189–196. https://doi.org/10.1016/j.neucom.2011.09.009 doi: 10.1016/j.neucom.2011.09.009
|
| [33] | E. Added, H. Gritli, S. Belghith, Modeling and analysis of the dynamic walking of a biped robot with knees, in 2021 18th International Multi-Conference on Systems, Signals and Devices (SSD), (2021), 179–185. https://doi.org/10.1109/SSD52085.2021.9429493 |
Figures(18) / Tables(1)
Jiarui Chen, Aimin Tang, Guanfeng Zhou, Ling Lin, Guirong Jiang. Walking dynamics for an ascending stair biped robot with telescopic legs and impulse thrust[J]. Electronic Research Archive, 2022, 30(11): 4108-4135. doi: 10.3934/era.2022208







 DownLoad:
DownLoad: