Citation: Bruno Di Buò, Marco D’Ignazio, Juha Selänpää, Markus Haikola, Tim Länsivaara, Marta Di Sante. Investigation and geotechnical characterization of Perniö clay, Finland[J]. AIMS Geosciences, 2019, 5(3): 591-616. doi: 10.3934/geosci.2019.3.591

| [1] | Di Buò B, D'Ignazio M, Selänpää J, et al. (2016) Preliminary results from a study aiming to improve ground investigation data. In Proceedings of the 17th Nordic Geotechnical Meeting, Reykjavik, 25–28. |
| [2] | Selänpää J, Di Buò B, Länsivaara T, et al. (2017) Problems related to field vane testing in soft soil conditions and improved reliability of measurements using an innovative field vane device. Landslides in Sensitive Clays, Springer, Cham, 109–119. |
| [3] | D'Ignazio M, Mansikkamäki J, Länsivaara T (2014) Anisotropic total and effective stress stability analysis of the Perniö failure test. In Proceedings of Conference on Numerical Methods in Geotechnical Engineering (NUMGE), Delft, the Netherlands 2: 609–614. |
| [4] |
Lehtonen VJ, Meehan CL, Länsivaara T, et al. (2015) Full-scale embankment failure test under simulated train loading. Géotechnique 65: 961–974. doi: 10.1680/jgeot.14.P.100

|
| [5] | Lehtonen V (2015) Modelling undrained shear strength and pore pressure based on an effective stress soil model in Limit Equilibrium Method. Doctoral dissertation, Ph. D. thesis, Tampere University of Technology, Tampere. Publication 1337. |
| [6] | Mansikkamäki J (2015) Effective stress finite element stability analysis of an old railway embankment on soft clay. Doctoral dissertation, Ph. D. thesis, Tampere University of Technology, Tampere. Publication 1287. |
| [7] | D'Ignazio M, Di Buò B, Länsivaara T (2015) A study on the behaviour of the weathered crust in the Perniö failure test. In Proceedings of the XVI European Conference on Soil Mechanics and Geotechnical Engineering, XVI ECSMGE, Edinburgh, Scotland, ICE Publishing, 3639–3644. |
| [8] | D'Ignazio M (2016) Undrained shear strength of Finnish clays for stability analyses of embankments. Doctoral dissertation, Ph. D. thesis, Tampere University of Technology, Tampere. Publication 1412. |
| [9] |
D'Ignazio M, Länsivaara T, Jostad HP (2017) Failure in anisotropic sensitive clays: finite element study of Perniö failure test. Can Geotech J 54: 1013–1033. doi: 10.1139/cgj-2015-0313
|
| [10] | Di Buò B, Selänpää J, Länsivaara T, et al. (2018) Evaluation of sample quality from different sampling methods in Finnish soft sensitive clays. Can Geotech J, Available online, DOI: doi.org/10.1139/cgj-2018-0066. |
| [11] |
Emdal A, Gylland A, Amundsen HA, et al. (2016) Mini-block sampler. Can Geotech J 53: 1235–1245. doi: 10.1139/cgj-2015-0628
|
| [12] |
D'Ignazio M, Phoon KK, Tan SA, et al. (2016) Correlations for undrained shear strength of Finnish soft clays. Can Geotech J 53: 1628–1645. doi: 10.1139/cgj-2016-0037
|
| [13] | Haikola M (2018) Water content determination of soft Finnish clays using electrical conductivity measurements. M. Sc. Thesis, Tampere University of Technology, Finland. |
| [14] |
Eronen M, Gluckert G, Hatakka L, et al. (2001) Rates of Holocene isostatic uplift and relative sea level lowering of the Baltic in SW Finland based on studies of isolation contacts. Boreas 30: 17–30. doi: 10.1080/03009480119400
|
| [15] | ISO (2006) Geotechnical investigation and testing–field testing–part 1: electrical cone and piezocone penetration test. ISO 22476-1.2012. |
| [16] | Mäenpää J (2016) Seismisen CPTU-mittauksen käyttö leikkausaallon nopeuden määrittämiseen. (In Finnish. Title in english: Determining Shear Wave Velocity by Seismic CPTU). M. Sc. Thesis, Tampere University of Technology, Finland. |
| [17] | SFS (2006) Finnish Standards: Geotechnical Investigation and Testing. Sampling Methods and Groundwater Measurements. Part 1. Technical Principles for Execution, SFS-EN ISO 22475-1:2006E, 120. |
| [18] | Mataic I (2016) On structure and rate dependence of Perniö clay. Doctoral dissertation, Ph. D. thesis, Department of Civil and Environmental Engineering, Aalto University, Helsinki, Finland. |
| [19] | Andresen A, Kolstad P (1980) The NGI 54-mm samplers for undisturbed sampling of clays and representative sampling of coarser material. NGI Publication No. 21, Norwegian Geotechnical Institute, Oslo, 1–31. |
| [20] | Larsson R (2011) Metodbeskrivning för SGI:s 200 mm diameter "blockprovtagare"-Ostörd Provtagning i finkornig jord (In Swedish), Swedish Geotechnical Institute (SGI). Göta River Commission, GÄU. Subreport 33. Linköping. |
| [21] | Lunne T, Berre T, Strandvik S (1997) Sample disturbance effects in soft low plastic Norwegian clay. In Proceedings of the Conference on Recent Developments in Soil and Pavement Mechanics, Rio de Janeiro, 81–102. |
| [22] | ISO (2004) ISO/TS 17892-12:2004 Geotechnical investigation and testing-Laboratory testing of soil-Part 12: Determination of Atterberg limits. |
| [23] | Kolisoja P, Sahi K, Hartikainen J (1989) An automatic triaxial-oedometer device. In Proceedings of the 12th International Conference on Soil Mechanics and Foundaiton Engineering, Rio De Janeiro, 61–64. |
| [24] | Sällfors G (1975) Preconsolidation pressure of soft, high-plastic clays. Doctoral dissertation, Chalmers University of Technology, Göteborg, Sweden. |
| [25] | Kulhawy FH, Mayne PW (1990) Manual on estimating soil properties for foundation design (No. EPRI-EL-6800). Electric Power Research Inst., Palo Alto, CA (USA); Cornell Univ., Ithaca, NY (USA). |
| [26] | Selänpää J (2019) A correlation to assess undrained shear strength by piezocone test for Finnish clay (CPTu). Doctoral dissertation, Ph. D. thesis, Tampere University, Tampere. Under review. |
| [27] | Selänpää J, Di Buò B, Haikola M, et al. (2018) Evaluation of existing CPTu-based correlations for the undrained shear strength of soft Finnish clays. In Cone Penetration Testing IV: Proceedings of the 4th International Symposium on Cone Penetration Testing (CPT 2018), Delft, CRC Press, 185–191. |
| [28] | Karlsrud K, Lunne T, Kort DA, et al. (2005) CPTU correlations for clays. In Proceedings of the international conference on soil mechanics and geotechnical engineering (Osaka). AA Balkema Publishers 16: 693. |
| [29] |
Paniagua P, D'Ignazio M, L'Heureux JS, et al. (2019) CPTU correlations for Norwegian clays: an update. AIMS Geosci 5: 82–103. doi: 10.3934/geosci.2019.2.82
|
| [30] |
Karlsrud K, Hernandez-Martinez FG (2013) Strength and deformation properties of Norwegian clays from laboratory tests on high-quality block samples. Can Geotech J 50: 1273–1293. doi: 10.1139/cgj-2013-0298
|
| [31] |
D'Ignazio M, Phoon KK, Tan SA, et al. (2017) Reply to the discussion by Mesri and Wang on "Correlations for undrained shear strength of Finnish soft clays". Can Geotech J 54: 749–753. doi: 10.1139/cgj-2017-0114
|
| [32] | Mayne PW (2005) Integrated ground behavior: in-situ and lab tests. Deformation Characteristics of Geomaterials, Taylor & Francis Group, London: 2. |
| [33] | Mayne PW (2007) NCHRP Synthesis 368 on Cone Penetration Testing. Transportation Research Board, Washington DC, 118. |
| [34] | Sanglerat G (1972) The Penetrometer and Soil Exploration Interpretation of Penetration Diagrams-theory and Practice: Developments in Geotechnical Engineering 1. Elsevier. |
| [35] | Di Buò B, Selänpää J, Lansivaara,T, et al. (2018) Evaluation of existing CPTu-based correlations for the deformation properties of Finnish soft clays. In Cone Penetration Testing IV: Proceedings of the 4th International Symposium on Cone Penetration Testing (CPT 2018), Delft 185–191. |
| [36] |
Mayne PW, Rix GJ (1995) Correlations between shear wave velocity and cone tip resistance in natural clays. Soils Found 35: 107–110. doi: 10.3208/sandf1972.35.2_107
|
| [37] |
Robertson PK (2009) Interpretation of cone penetration tests-a unified approach. Can Geotech J 46: 1337–1355. doi: 10.1139/T09-065
|
| [38] | Mayne PW (2014) Interpretation of geotechnical parameters from seismic piezocone tests. In Proceedings of 3rd International Symposium on Cone Penetration Testing, CPT14, Las Vegas, Nevada, Gregg Drilling & Testing. |
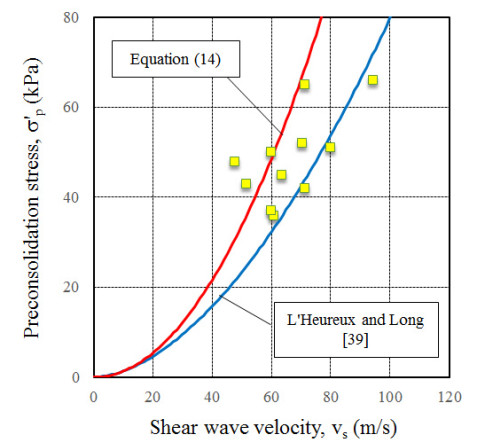
| [39] |
L'Heureux JS, Long M (2017) Relationship between shear-wave velocity and geotechnical parameters for Norwegian clays. J Geotech Geoenviron Eng 143: 04017013. doi: 10.1061/(ASCE)GT.1943-5606.0001645
|
| [40] |
Andersen KH, Schjetne K (2013) Database of friction angles of sand and consolidation characteristics of sand, silt, and clay. J Geotech Geoenviron Eng 139: 1140–1155. doi: 10.1061/(ASCE)GT.1943-5606.0000839
|
| [41] | Länsivaara (2012) Some aspects on creep and primary deformation properties of soft sensitive Scandinavian clays. In Proceedings of the 16th Nordic Geotechnical Meeting, NGM, Copenhagen, Denmark, 9–12. |
| [42] | Janbu N (1963) Soil compressibility as determined by oedometer and triaxial tests. In Proceeding of the European Conference on Soil Mechanics and Foundation Engineering 1: 19–25. |
Figures(20) / Tables(4)

Bruno Di Buò, Marco D’Ignazio, Juha Selänpää, Markus Haikola, Tim Länsivaara, Marta Di Sante. Investigation and geotechnical characterization of Perniö clay, Finland[J]. AIMS Geosciences, 2019, 5(3): 591-616. doi: 10.3934/geosci.2019.3.591







 DownLoad:
DownLoad: