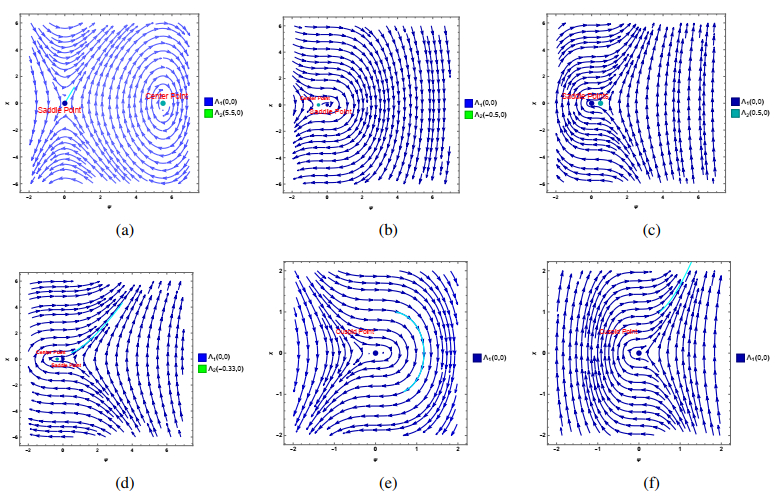
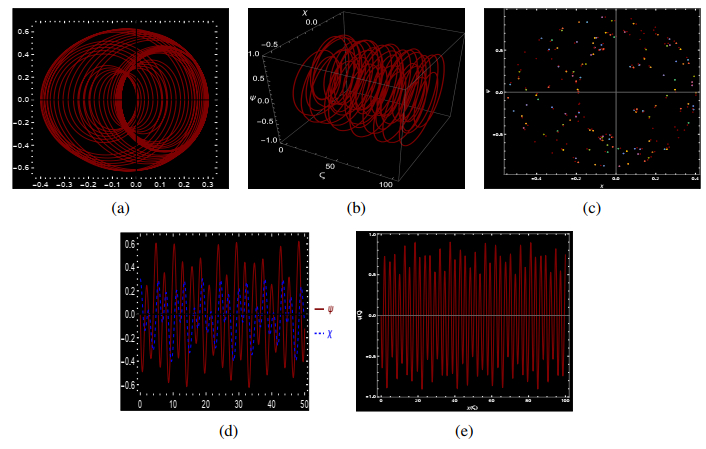
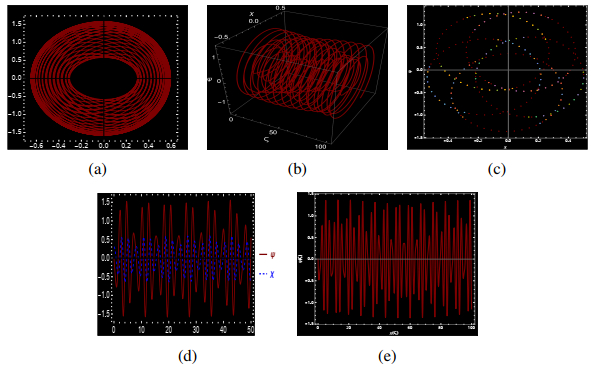
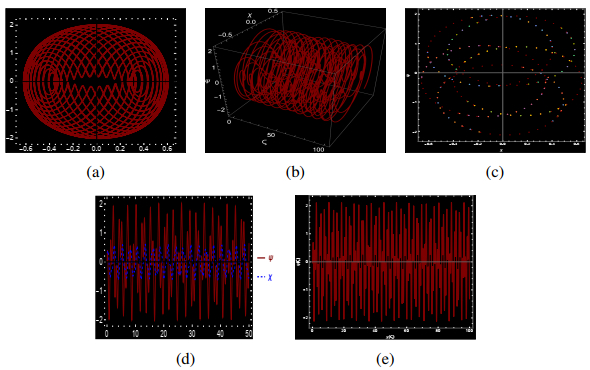
In this study, we apply the $ (m+\frac{1}{\Phi'}) $-expansion and modified extended tanh function (METHF) methods to investigate the exact solutions of the new Kairat-Ⅱ-Ⅹ model. Using these methods, new exact solutions are derived for the proposed model. The hyperbolic, periodic, and singular forms of exact solutions are among those obtained. The propagating behaviors of wave solutions are depicted using three-dimensional (3D), contour, and two-dimensional (2D) surfaces, providing comprehensive visualizations of the wave dynamics. Physical meanings of the chosen solutions are determined through these simulations. Traveling wave solutions of nonlinear partial differential equations can be obtained using the techniques presented in this paper since they have been shown to be dependable, strong, and effective. Furthermore, the phase portrait has been thoroughly analyzed according to the equilibrium points, and various scenarios have been visualized using these portraits. With the use of time series graphs, Poincaré maps, and 3D and 2D plots, the impact of the perturbation term has been thoroughly investigated. The system's periodic, quasi-periodic, and chaotic structures are clearly illustrated by these depictions. The results enhance the understanding of the new Kairat-Ⅱ-Ⅹ equation's dynamic structure and how it applies to real-world events.
Citation: Ulviye Demirbilek, Ali H. Tedjani, Aly R. Seadawy. Analytical solutions of the combined Kairat-Ⅱ-Ⅹ equation: a dynamical perspective on bifurcation, chaos, energy, and sensitivity[J]. AIMS Mathematics, 2025, 10(6): 13664-13691. doi: 10.3934/math.2025615
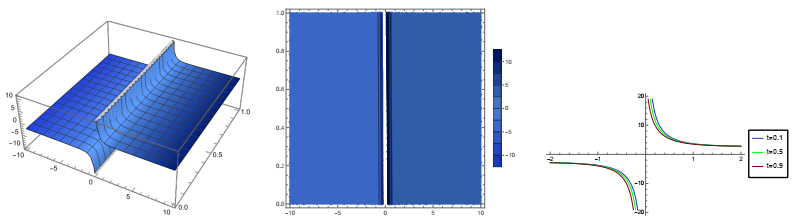
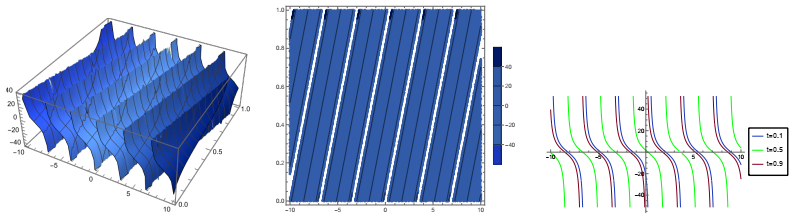
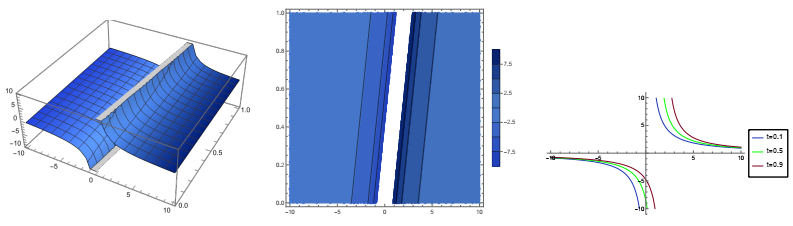
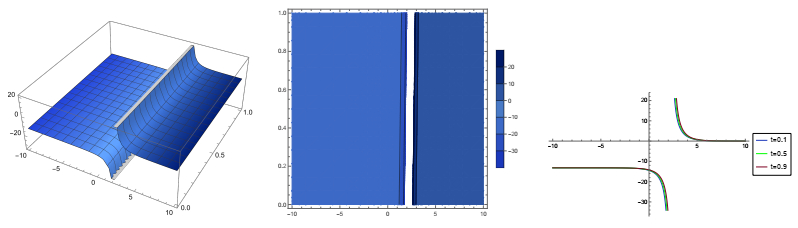
In this study, we apply the $ (m+\frac{1}{\Phi'}) $-expansion and modified extended tanh function (METHF) methods to investigate the exact solutions of the new Kairat-Ⅱ-Ⅹ model. Using these methods, new exact solutions are derived for the proposed model. The hyperbolic, periodic, and singular forms of exact solutions are among those obtained. The propagating behaviors of wave solutions are depicted using three-dimensional (3D), contour, and two-dimensional (2D) surfaces, providing comprehensive visualizations of the wave dynamics. Physical meanings of the chosen solutions are determined through these simulations. Traveling wave solutions of nonlinear partial differential equations can be obtained using the techniques presented in this paper since they have been shown to be dependable, strong, and effective. Furthermore, the phase portrait has been thoroughly analyzed according to the equilibrium points, and various scenarios have been visualized using these portraits. With the use of time series graphs, Poincaré maps, and 3D and 2D plots, the impact of the perturbation term has been thoroughly investigated. The system's periodic, quasi-periodic, and chaotic structures are clearly illustrated by these depictions. The results enhance the understanding of the new Kairat-Ⅱ-Ⅹ equation's dynamic structure and how it applies to real-world events.

| [1] |
X. W. Gao, Y. M. Zhu, T. Pan, Finite line method for solving high-order partial differential equations in science and engineering, Part. Differ. Equ. Appl. Math., 7 (2023), 100477. https://doi.org/10.1016/j.padiff.2022.100477 doi: 10.1016/j.padiff.2022.100477

|
| [2] |
T. Tripura, S. Chakraborty, Wavelet neural operator for solving parametric partial differential equations in computational mechanics problems, Comput. Methods Appl. Mech. Eng., 404 (2023), 115783. https://doi.org/10.1016/j.cma.2022.115783 doi: 10.1016/j.cma.2022.115783
|
| [3] |
L. Lu, R. Pestourie, S. G. Johnson, G. Romano, Multifidelity deep neural operators for efficient learning of partial differential equations with application to fast inverse design of nanoscale heat transport, Phys. Rev. Res., 4 (2022), 023210. https://doi.org/10.1103/PhysRevResearch.4.023210 doi: 10.1103/PhysRevResearch.4.023210
|
| [4] |
M. M. Bhatti, M. Marin, A. Zeeshan, S. I. Abdelsalam, Editorial: Recent trends in computational fluid dynamics, Front. Phys., 8 (2020), 593111. https://doi.org/10.3389/fphy.2020.593111 doi: 10.3389/fphy.2020.593111
|
| [5] |
S. T. R. Rizvi, S. O. Abbas, S. Ghafoor, A. Althobaiti, A. R. Seadawy, Soliton solutions with generalized Kudryashov method and study of variational integrators with Lagrangian to shallow water wave equation, Mod. Phys. Lett. A, 40 (2025), 2550043. https://doi.org/10.1142/S0217732325500439 doi: 10.1142/S0217732325500439
|
| [6] |
M. D. Shamshuddin, S. O. Salawu, S. Panda, S. R. Mishra, A. Alanazy, M. R. Eid, Thermal case exploration of electromagnetic radiative tri-hybrid nanofluid flow in Bi-directional stretching device in absorbent medium: SQLM analysis, Case Stud. Therm. Eng., 60 (2024), 104734. https://doi.org/10.1016/j.csite.2024.104734 doi: 10.1016/j.csite.2024.104734
|
| [7] |
C. Lv, L. Wang, C. Xie, A hybrid physics-informed neural network for nonlinear partial differential equation, Int. J. Mod. Phys. C, 34 (2023), 2350082. https://doi.org/10.1142/S0129183123500821 doi: 10.1142/S0129183123500821
|
| [8] |
S. O. Abbas, S. Shabbir, S. T. R. Rizvi, A. R. Seadawy, Optical dromions for M-fractional Kuralay equation via complete discrimination system approach along with sensitivity analysis and quasi-periodic behavior, Mod. Phys. Lett. B, 39 (2025), 2550048. https://doi.org/10.1142/S0217984925500484 doi: 10.1142/S0217984925500484
|
| [9] |
B. Q. Li, Y. L. Ma, Optical soliton resonances and soliton molecules for the Lakshmanan–Porsezian–Daniel system in nonlinear optics, Nonlinear Dyn., 111 (2023), 6689–6699. https://doi.org/10.1007/s11071-022-08195-8 doi: 10.1007/s11071-022-08195-8
|
| [10] |
S. Liu, Z. Fu, S. Liu, Q. Zhao, Jacobi elliptic function expansion method and periodic wave solutions of nonlinear wave equations, Phys. Lett. A, 289 (2001), 69–74. https://doi.org/10.1016/S0375-9601(01)00580-1 doi: 10.1016/S0375-9601(01)00580-1
|
| [11] |
S. Kumar, S. Malik, H. Rezazadeh, L. Akinyemi, The integrable Boussinesq equation and its breather, lump and soliton solutions, Nonlinear Dyn., 107 (2022), 2703–2714. https://doi.org/10.1007/s11071-021-07076-w doi: 10.1007/s11071-021-07076-w
|
| [12] |
K. U. Tariq, H. Rezazadeh, R. N. Tufail, U. Demirbilek, Propagation of lump and travelling wave solutions to the (4+1)-dimensional Fokas equation arise in mathematical physics, Int. J. Geom. Methods Mod. Phys., 2024. https://doi.org/10.1142/S0219887825500227 doi: 10.1142/S0219887825500227
|
| [13] |
B. Mohan, S. Kumar, R. Kumar, On investigation of kink-solitons and rogue waves to a new integrable (3+1)-dimensional KdV-type generalized equation in nonlinear sciences, Nonlinear Dyn., 113 (2025), 10261–10276. https://doi.org/10.1007/s11071-024-10792-8 doi: 10.1007/s11071-024-10792-8
|
| [14] |
B. Mohan, S. Kumar, Painlevé analysis, restricted bright-dark N-solitons, and N-rogue waves of a (4+1)-dimensional variable-coefficient generalized KP equation in nonlinear sciences, Nonlinear Dyn., 113 (2025), 11893–11906. https://doi.org/10.1007/s11071-024-10645-4 doi: 10.1007/s11071-024-10645-4
|
| [15] |
B. Mohan, S. Kumar, Rogue-wave structures for a generalized (3+1)-dimensional nonlinear wave equation in liquid with gas bubbles, Phys. Scr., 99 (2024), 105291. https://doi.org/10.1088/1402-4896/ad7cd9 doi: 10.1088/1402-4896/ad7cd9
|
| [16] |
S. Kumar, S. K. Dhiman, Lie symmetry analysis, optimal system, exact solutions and dynamics of solitons of a (3+1)-dimensional generalised BKP–Boussinesq equation, Pramana, 96 (2022), 31. https://doi.org/10.1007/s12043-021-02269-9 doi: 10.1007/s12043-021-02269-9
|
| [17] |
K. Shehzad, J. Wang, M. Arshad, A. Althobaiti, A. R. Seadawy, Analytical solutions of (3+1)-dimensional modified KdV–Zakharov–Kuznetsov dynamical model in a homogeneous magnetized electron–positron–ion plasma and its applications, Int. J. Geom. Methods Mod. Phys., 22 (2025), 2450314. https://doi.org/10.1142/S0219887824503146 doi: 10.1142/S0219887824503146
|
| [18] |
M. Şenol, Abundant solitary wave solutions to the new extended (3+1)-dimensional nonlinear evolution equation arising in fluid dynamics, Mod. Phys. Lett. B, 39 (2024), 2450475. https://doi.org/10.1142/S021798492450475X doi: 10.1142/S021798492450475X
|
| [19] |
M. Şenol, M. Gençyiğit, U. Demirbilek, L. Akinyemi, H. Rezazadeh, New analytical wave structures of the (3+1)-dimensional extended modified Ito equation of seventh-order, J. Appl. Math. Comput., 70 (2024), 2079–2095. https://doi.org/10.1007/s12190-024-02029-z doi: 10.1007/s12190-024-02029-z
|
| [20] |
S. Ramzan, M. Arshad, A. R. Seadawy, I. Ahmed, N. Hussain, Studying exploring paraxial wave equation in Kerr media: unveiling the governing laws, rational solitons and multi-wave solutions and their stability with applications, Mod. Phys. Lett. B, 39 (2025), 2450513. https://doi.org/10.1142/S0217984924505134 doi: 10.1142/S0217984924505134
|
| [21] |
C. A. Gomez, H. Rezazadeh, M. Inc, L. Akinyemi, F. Nazari, The generalization of the Chen-Lee-Liu equation with higher order nonlinearity: exact solutions, Opt. Quant. Electron., 54 (2022), 492. https://doi.org/10.1007/s11082-022-03923-1 doi: 10.1007/s11082-022-03923-1
|
| [22] |
A. R. Seadawy, B. A. Alsaedi, Variational principle and optical soliton solutions for some types of nonlinear Schrödinger dynamical systems, Int. J. Geom. Methods Mod. Phys., 21 (2024), 2430004. https://doi.org/10.1142/S0219887824300046 doi: 10.1142/S0219887824300046
|
| [23] |
F. Shehzad, H. Zahed, S. T. R. Rizvi, S. Ahmed, S. Abdel-Khalek, A. R. Seadawy, Generalized breather, solitons, rogue waves, and lumps for superconductivity and drift cyclotron waves in plasma, Braz. J. Phys., 55 (2025), 118. https://doi.org/10.1007/s13538-025-01738-5 doi: 10.1007/s13538-025-01738-5
|
| [24] |
S. T. R. Rizvi, A. R. Seadawy, A. Althobaiti, K. Ali, S. Ahmed, Study of fifth-order nonlinear Caudrey–Dodd–Gibbon model for multiwave, M-shaped solitons, lumps, generalized breathers, manifold periodic, rogue wave and kink wave interactions, Int. J. Comput. Methods, 22 (2025), 2450053. https://doi.org/10.1142/S0219876224500531 doi: 10.1142/S0219876224500531
|
| [25] |
S. T. Abdulazeez, M. Modanli, Analytic solution of fractional order pseudo-hyperbolic telegraph equation using modified double Laplace transform method, Int. J. Math. Comput. Eng., 1 (2023). https://doi.org/10.2478/ijmce-2023-0008 doi: 10.2478/ijmce-2023-0008
|
| [26] |
R. Khaji, S. K. Hameed, Application of Laplace transform method for solving weakly-singular integro-differential equations, Math. Model. Eng. Probl., 11 (2024), 1099–1106. https://doi.org/10.18280/mmep.110428 doi: 10.18280/mmep.110428
|
| [27] |
A. R. Seadawy, B. A. Alsaedi, Dynamical stricture of optical soliton solutions and variational principle of nonlinear Schrödinger equation with Kerr law nonlinearity, Mod. Phys. Lett. B, 38 (2024), 2450254. https://doi.org/10.1142/S0217984924502543 doi: 10.1142/S0217984924502543
|
| [28] |
N. Shahid, M. Z. Baber, T. S. Shaikh, G. Iqbal, N. Ahmed, A. Akgül, et al., Dynamical study of groundwater systems using the new auxiliary equation method, Results Phys., 58 (2024), 107444. https://doi.org/10.1016/j.rinp.2024.107444 doi: 10.1016/j.rinp.2024.107444
|
| [29] |
D. A. Koç, Y. Pandır, H. Bulut, A new study on fractional Schamel Korteweg–De Vries equation and modified Liouville equation, Chin. J. Phys., 92 (2024), 124–142. https://doi.org/10.1016/j.cjph.2024.08.032 doi: 10.1016/j.cjph.2024.08.032
|
| [30] |
Y. Pandir, H. Yasmin, Optical soliton solutions of the generalized sine-Gordon equation, Electron. J. Appl. Math., 1 (2023), 71–86. https://doi.org/10.61383/ejam.20231239 doi: 10.61383/ejam.20231239
|
| [31] |
H. Tariq, H. Ashraf, H. Rezazadeh, U. Demirbilek, Travelling wave solutions of nonlinear conformable Bogoyavlenskii equations via two powerful analytical approaches, Appl. Math.–J. Chin. Univ., 39 (2024), 502–518. https://doi.org/10.1007/s11766-024-5030-7 doi: 10.1007/s11766-024-5030-7
|
| [32] |
F. Batool, H. Rezazadeh, Z. Ali, U. Demirbilek, Exploring soliton solutions of stochastic Phi-4 equation through extended Sinh-Gordon expansion method, Opt. Quant. Electron., 56 (2024), 785. https://doi.org/10.1007/s11082-024-06385-9 doi: 10.1007/s11082-024-06385-9
|
| [33] |
U. Demirbilek, K. R. Mamedov, Application of IBSEF method to Chaffee–Infante equation in (1+1) and (2+1) dimensions, Comput. Math. Math. Phys., 63 (2023), 1444–1451. https://doi.org/10.1134/S0965542523080067 doi: 10.1134/S0965542523080067
|
| [34] |
A. R. Seadawy, B. A. Alsaedi, Variational principle for generalized unstable and modify unstable nonlinear Schrödinger dynamical equations and their optical soliton solutions, Opt. Quant. Electron., 56 (2024), 844. https://doi.org/10.1007/s11082-024-06417-4 doi: 10.1007/s11082-024-06417-4
|
| [35] |
D. Saha, P. Chatterjee, S. Raut, Multi-shock and soliton solutions of the Burgers equation employing Darboux transformation with the help of the Lax pair, Pramana, 97 (2023), 54. https://doi.org/10.1007/s12043-023-02534-z doi: 10.1007/s12043-023-02534-z
|
| [36] | Z. Myrzakulova, S. Manukure, R. Myrzakulov, G. Nugmanova, Integrability, geometry, and wave solutions of some Kairat equations, arXiv Preprint, 2023. https://doi.org/10.48550/arXiv.2307.00027 |
| [37] |
S. Zhang, G. Zhu, W. Huang, H. Wang, C. Yang, Y. Lin, Symbolic computation of analytical solutions for nonlinear partial differential equations based on bilinear neural network method, Nonlinear Dyn., 113 (2025), 7121–7137. https://doi.org/10.1007/s11071-024-10715-7 doi: 10.1007/s11071-024-10715-7
|
| [38] |
R. F. Zhang, M. C. Li, Bilinear residual network method for solving the exactly explicit solutions of nonlinear evolution equations, Nonlinear Dyn., 108 (2022), 521–531. https://doi.org/10.1007/s11071-022-07207-x doi: 10.1007/s11071-022-07207-x
|
| [39] |
X. R. Xie, R. F. Zhang, Neural network-based symbolic calculation approach for solving the Korteweg–de Vries equation, Chaos, Soliton. Fract., 194 (2025), 116232. https://doi.org/10.1016/j.chaos.2025.116232 doi: 10.1016/j.chaos.2025.116232
|
| [40] |
Z. Liang, X. Meng, Stability and Hopf bifurcation of a multiple delayed predator–prey system with fear effect, prey refuge and Crowley–Martin function, Chaos, Soliton. Fract., 175 (2023), 113955. https://doi.org/10.1016/j.chaos.2023.113955 doi: 10.1016/j.chaos.2023.113955
|
| [41] |
M. S. Ullah, M. Z. Ali, H. O. Roshid, Bifurcation, chaos, and stability analysis to the second fractional WBBM model, PLoS One, 19 (2024), e0307565. https://doi.org/10.1371/journal.pone.0307565 doi: 10.1371/journal.pone.0307565
|
| [42] |
B. Li, Y. Zhang, X. Li, Z. Eskandari, Q. He, Bifurcation analysis and complex dynamics of a Kopel triopoly model, J. Comput. Appl. Math., 426 (2023), 115089. https://doi.org/10.1016/j.cam.2023.115089 doi: 10.1016/j.cam.2023.115089
|
| [43] |
S. Boulaaras, S. Sriramulu, S. Arunachalam, A. Allahem, A. Alharbi, T. Radwan, Chaos and stability analysis of the nonlinear fractional-order autonomous system, Alex. Eng. J., 118 (2025), 278–291. https://doi.org/10.1016/j.aej.2025.01.060 doi: 10.1016/j.aej.2025.01.060
|
| [44] |
K. Hosseini, E. Hinçal, M. Ilie, Bifurcation analysis, chaotic behaviors, sensitivity analysis, and soliton solutions of a generalized Schrödinger equation, Nonlinear Dyn., 111 (2023), 17455–17462. https://doi.org/10.1007/s11071-023-08759-2 doi: 10.1007/s11071-023-08759-2
|
| [45] |
T. Jamal, A. Jhangeer, M. Z. Hussain, An anatomization of pulse solitons of nerve impulse model via phase portraits, chaos and sensitivity analysis, Chin. J. Phys., 87 (2024), 496–509. https://doi.org/10.1016/j.cjph.2023.12.005 doi: 10.1016/j.cjph.2023.12.005
|
| [46] |
N. Nasreen, M. Naveed Rafiq, U. Younas, D. Lu, Sensitivity analysis and solitary wave solutions to the (2+1)-dimensional Boussinesq equation in dispersive media, Mod. Phys. Lett. B, 38 (2024), 2350227. https://doi.org/10.1142/S0217984923502275 doi: 10.1142/S0217984923502275
|
| [47] |
A. M. Alqahtani, S. Akram, M. Alosaimi, Study of bifurcations, chaotic structures with sensitivity analysis and novel soliton solutions of non-linear dynamical model, J. Taibah Univ. Sci., 18 (2024), 2399870. https://doi.org/10.1080/16583655.2024.2399870 doi: 10.1080/16583655.2024.2399870
|
| [48] |
J. R. M. Borhan, M. M. Miah, F. Alsharif, M. Kanan, Abundant closed-form soliton solutions to the fractional stochastic Kraenkel–Manna–Merle system with bifurcation, chaotic, sensitivity, and modulation instability analysis, Fractal Fract., 8 (2024), 327. https://doi.org/10.3390/fractalfract8060327 doi: 10.3390/fractalfract8060327
|
| [49] |
C. Zhu, M. Al-Dossari, S. Rezapour, S. A. M. Alsallami, B. Gunay, Bifurcations, chaotic behavior, and optical solutions for the complex Ginzburg–Landau equation, Results Phys., 59 (2024), 107601. https://doi.org/10.1016/j.rinp.2024.107601 doi: 10.1016/j.rinp.2024.107601
|
| [50] |
J. Qi, Q. Cui, L. Bai, Y. Sun, Investigating exact solutions, sensitivity, and chaotic behavior of multi-fractional order stochastic Davey–Sewartson equations for hydrodynamics research applications, Chaos, Soliton. Fract., 180 (2024), 114491. https://doi.org/10.1016/j.chaos.2024.114491 doi: 10.1016/j.chaos.2024.114491
|
| [51] |
N. Tufillaro, An experimental approach to nonlinear dynamics and chaos, ScienceOpen Preprints, 2024. https://doi.org/10.14293/PR2199.000685.v1 doi: 10.14293/PR2199.000685.v1
|
| [52] |
M. H. Rafiq, N. Raza, A. Jhangeer, A. M. Zidan, Qualitative analysis, exact solutions and symmetry reduction for a generalized (2+1)-dimensional KP–MEW-Burgers equation, Chaos, Soliton. Fract., 181 (2024), 114647. https://doi.org/10.1016/j.chaos.2024.114647 doi: 10.1016/j.chaos.2024.114647
|
| [53] | M. Awadalla, A. Zafar, A. Taishiyeva, M. Raheel, R. Myrzakulov, A. Bekir, Exact soliton solutions of M-fractional Kairat-Ⅱ and Kairat-Ⅹ equations via three analytical methods, Front. Phys., 2024. |
| [54] |
G. H. Tipu, W. A. Faridi, Z. Myrzakulova, R. Myrzakulov, S. A. AlQahtani, N. F. AlQahtani, et al., On optical soliton wave solutions of non-linear Kairat-Ⅹ equation via new extended direct algebraic method, Opt. Quant. Electron., 56 (2024), 655. https://doi.org/10.1007/s11082-024-06369-9 doi: 10.1007/s11082-024-06369-9
|
| [55] |
J. Muhammad, S. U. Rehman, N. Nasreen, M. Bilal, U. Younas, Exploring the fractional effect to the optical wave propagation for the extended Kairat-Ⅱ equation, Nonlinear Dyn., 113 (2025), 1501–1512. https://doi.org/10.1007/s11071-024-10139-3 doi: 10.1007/s11071-024-10139-3
|
| [56] |
W. A. Faridi, A. M. Wazwaz, A. M. Mostafa, R. Myrzakulov, Z. Umurzakhova, The Lie point symmetry criteria and formation of exact analytical solutions for Kairat-Ⅱ equation: Paul-Painlevé approach, Chaos, Soliton. Fract., 182 (2024), 114745. https://doi.org/10.1016/j.chaos.2024.114745 doi: 10.1016/j.chaos.2024.114745
|
| [57] |
M. Iqbal, D. Lu, A. R. Seadawy, F. A. Alomari, Z. Umurzakhova, R. Myrzakulov, Constructing the soliton wave structure to the nonlinear fractional Kairat-Ⅹ dynamical equation under computational approach, Mod. Phys. Lett. B, 39 (2025), 2450396. https://doi.org/10.1142/S0217984924503962 doi: 10.1142/S0217984924503962
|
| [58] |
A. M. Wazwaz, W. Alhejaili, S. El-Tantawy, Study of a combined Kairat-Ⅱ-Ⅹ equation: Painlevé integrability, multiple kink, lump and other physical solutions, Int. J. Numer. Methods Heat Fluid Flow, 34 (2024), 3715–3730. https://doi.org/10.1108/HFF-05-2024-0411 doi: 10.1108/HFF-05-2024-0411
|
| [59] |
U. Demirbilek, M. Nadeem, F. M. Çelik, H. Bulut, M. Şenol, Generalized extended (2+1)-dimensional Kadomtsev-Petviashvili equation in fluid dynamics: analytical solutions, sensitivity and stability analysis, Nonlinear Dyn., 112 (2024), 13393–13408. https://doi.org/10.1007/s11071-024-09724-3 doi: 10.1007/s11071-024-09724-3
|
| [60] |
D. A. Koç, Y. S. Gasimov, H. Bulut, A study on the investigation of the traveling wave solutions of the mathematical models in physics via $\left(m+\left(1/G'\right)\right)$-expansion method, Adv. Math. Models Appl., 9 (2024), 5–13. https://doi.org/10.62476/amma9105 doi: 10.62476/amma9105
|
Figures(12) / Tables(1)

Ulviye Demirbilek, Ali H. Tedjani, Aly R. Seadawy. Analytical solutions of the combined Kairat-Ⅱ-Ⅹ equation: a dynamical perspective on bifurcation, chaos, energy, and sensitivity[J]. AIMS Mathematics, 2025, 10(6): 13664-13691. doi: 10.3934/math.2025615







 DownLoad:
DownLoad: