Unlike conventional methods of pests control, introducing in an appropriate mathematical model can contribute a batter performance on pests control with higher efficiency while lest damage to ecosystem. To fill the research gap on plant root pest control, we propose a plant root pest management model with state pulse feedback control. Firstly, the stability of the equilibrium point of the model (1.3) is analyzed by using the linear approximate equation, given that the only positive equilibrium point of model (1.3) is globally asymptotically stable. Moreover, the existence and uniqueness of order 1 periodic solutions of model (1.3) are discussed in detail according to the geometric theory of semi-continuous dynamical systems, successor functions method and the qualitative theory of differential equations. Finally, with further analysis in different methods, the asymptotic stability of the order 1 periodic solution of model (1.3) is obtained by using Similar Poincare Criterion or interval set theorem. The results show that this model can effectively control the number of pests below the economic level of damage.
Citation: Lizhuang Huang, Yuan Zhuang, Qiong Liu. A mathematical model study on plant root pest management[J]. AIMS Mathematics, 2023, 8(4): 9965-9981. doi: 10.3934/math.2023504
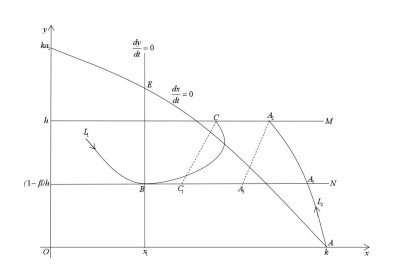
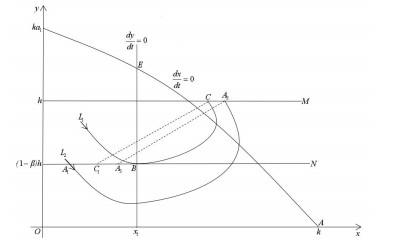
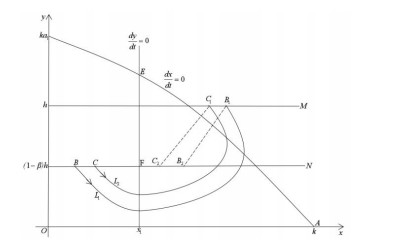
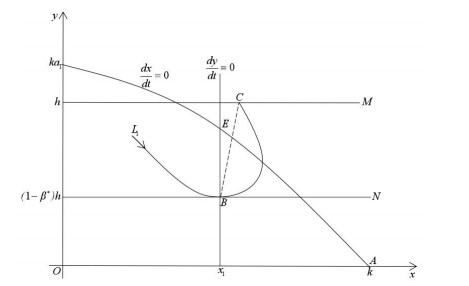
Unlike conventional methods of pests control, introducing in an appropriate mathematical model can contribute a batter performance on pests control with higher efficiency while lest damage to ecosystem. To fill the research gap on plant root pest control, we propose a plant root pest management model with state pulse feedback control. Firstly, the stability of the equilibrium point of the model (1.3) is analyzed by using the linear approximate equation, given that the only positive equilibrium point of model (1.3) is globally asymptotically stable. Moreover, the existence and uniqueness of order 1 periodic solutions of model (1.3) are discussed in detail according to the geometric theory of semi-continuous dynamical systems, successor functions method and the qualitative theory of differential equations. Finally, with further analysis in different methods, the asymptotic stability of the order 1 periodic solution of model (1.3) is obtained by using Similar Poincare Criterion or interval set theorem. The results show that this model can effectively control the number of pests below the economic level of damage.

| [1] | W. Wang, L. Tian, M. Yang, Analysis on soil pollution causes and research on prevention and control countermeasures in our country, Industrial Safety Environmental Protection, 42 (2016), 48–51. |
| [2] | Q. Liu, L. Huang, The mathematical model of pest control, Math. Practice Theory, 50 (2020), 217–224. |
| [3] |
T. Tian, X. Li, Y. Gan, Dynamic analysis of impulsive model with integrated control, J. Xinyang Normal Univ. (Nat. Sci.), 33 (2020), 21–24. https://doi.10.3969/j.issn.1003-0972.2020.01.004 doi: 10.3969/j.issn.1003-0972.2020.01.004

|
| [4] |
Q. Liu, L. Huang, L. Chen, A pest management model with state feedback control, Adv. Dierence Equations, 2016 (2016), 292. https://doi.10.1186/s13662-016-0985-1 doi: 10.1186/s13662-016-0985-1
|
| [5] | L. Chen, Pest control and geometric theory of semicontinuous dynamical system, J. Beihua Univ.(Nat.Sci.)., 12 (2011), 1–9. |
| [6] |
T. Yu, K. Ye, X. Song, Dynamical analyses of an integrated pest management predator-prey model with allee effect, J. Xinyang Normal Univ.(Nat.Sci.)., 31 (2018), 173–178. https://doi.10.3969/j.issn.1003-0972.2018.02.001 doi: 10.3969/j.issn.1003-0972.2018.02.001
|
| [7] |
M. Sun, Y. Liu, S. Liu, et al, A novel method for analyzing the stability of periodic solution of impulsive state feedback model, Appl. Math. Comput., 273 (2016), 425–434. https://doi:org/10.1016/j.amc.2015.09.093 doi: 10.1016/j.amc.2015.09.093
|
| [8] |
G. Pang, L. Chen, Periodic solution of the system with impulsive state feedback control, Nonlinear Dynam., 78 (2014), 743–753. https://doi.10.1007/s11071-014-1473-3 doi: 10.1007/s11071-014-1473-3
|
| [9] |
H. Guo, L. Chen, X. Song, Geometric properties of solution of a cylindrical dynamic system with impulsive state feedback control, Nonlinear Anal. Hybrid Syst., 15 (2015), 98–111. https://doi.org/10.1016/j.nahs.2014.08.002 doi: 10.1016/j.nahs.2014.08.002
|
| [10] |
L. Huang, Q. Liu, Research on a kind of fishery model with constant Harvesting and state feed back control, J. Xinyang Normal Univ(Nat.Sci.)., 34 (2021), 177–181. https://doi.10.3969/j.issn.1003-0972.2021.02.002 doi: 10.3969/j.issn.1003-0972.2021.02.002
|
| [11] | J. Fu, L. Chen, Mathematical study on non-polluted strategy for pest control, Math. Practice Theory, 41 (2011), 144–150. |
| [12] |
C. Wei, L. Chen, Periodic solution and heteroclinic bifurcation in a predator-prey system with Allee effect and impulsive harvesting, Nonlinear Dynam., 76 (2014), 1109–1117. https://doi.10.1007/s11071-013-1194-z doi: 10.1007/s11071-013-1194-z
|
| [13] |
Y. Tian, Y. Gao, Qualitative analysis and feedback control of predator-prey model with anti-predation effect, J. Xinyang Normal Univ.(Nat.Sci.)., 35 (2022), 523–527. https://doi.10.3969/j.issn.1003-0972.2022.04.002 doi: 10.3969/j.issn.1003-0972.2022.04.002
|
| [14] |
L. Huang, Q. Liu, D. Chen, A pest management model with state pulse feedback control, J. Guangxi Univ.(Nat.Sci.)., 45 (2020), 911–919. https://doi.10.13624/j.cnki.issn.1001-7445.2020.0911 doi: 10.13624/j.cnki.issn.1001-7445.2020.0911
|
| [15] |
H. Guo, L. Chen, X. Song, Qualitative analysis of impulsive state feedback control to analgae-fish system with bistable property, Appl. Math. Comput., 271 (2015), 905–922. https://doi:org/10.1016/j.amc.2015.09.046 doi: 10.1016/j.amc.2015.09.046
|
| [16] |
H. Guo, X. Song, L. Chen, Qualitative analysis of a korean pine forest model with impulsive thinning, Appl. Math. Comput., 234 (2014), 203–213. https://doi:org/10.1016/j.amc.2014.02.034 doi: 10.1016/j.amc.2014.02.034
|
| [17] |
Q. Liu, M. Zhang, L. Chen, State feed baek impulsive therapy to SIS model of animal infectious diseases, Phys. A., 516 (2019), 222–232. https://doi:org/10.1016/j.physa.2018.09.161 doi: 10.1016/j.physa.2018.09.161
|
| [18] |
G. Pang, L. Chen, W. Xu, G. Fu, A stage structure pest management model with Impulsive state feedback control, Commun. Nonlinear Sci. Numer. Simul., 23 (2015), 189–197. https://doi:org/10.1016/j.cnsns.2014.10.033 doi: 10.1016/j.cnsns.2014.10.033
|
| [19] |
T. Wang, P. Zuo, J. Cai, Studies on the model concerning controlling plant root pests, J. Xinyang Normal Univ.(Nat. Sci.)., 31 (2018), 517–519. https://doi.10.3969/j.issn.1003-0972.2018.04.001 doi: 10.3969/j.issn.1003-0972.2018.04.001
|
| [20] |
J. Fu, L. Chen, Qualitative analysis of a class predator-prey model with mutual interference, J. Syst. Sci. Math Sci., 37 (2017), 1166–1178. https://doi.10.12341/jssms13149 doi: 10.12341/jssms13149
|
| [21] | R. Cheng, S. Cai, A qualitative Analysis of a kind of food with functional response-two group types of predators, J. Biomath., 4 (2002), 406–410. |
| [22] |
L. Zhang, Y. Zhou, Fractional Cauchy problems with almost sectorial operators, Appl. Math. Comput., 257 (2015), 145–157. https://doi:org/10.1016/j.amc.2014.07.024 doi: 10.1016/j.amc.2014.07.024
|
| [23] |
Y. Guo, M. Chen, X. Shu, F. Xu, The existence and Hyers-Ulam stability of solution for almost periodical fractional stochastic differential equation with fBm, Stoch. Anal. Appl., 39 (2021), 643–666. https://doi:org/10.1080/07362994.2020.1824677 doi: 10.1080/07362994.2020.1824677
|
| [24] |
Y. Guo, X. Shu, Q. Yin, Existence of solutions for first-order Hamiltonian random impulsive differential equations with Dirichlet boundary conditions, Discrete Contin. Dyn. Syst. Ser. B., 27 (2022), 4455–4471. https://doi:10.3934/dcdsb.2021236 doi: 10.3934/dcdsb.2021236
|
| [25] |
L. Chen, X. Liang, Y. Pei, The periodic solutions of the impulsive state feedback dynamical system, Commun. Math. Biol. Neurosci., 2018 (2018), 14. https://doi:org/10.28919/cmbn/3754 doi: 10.28919/cmbn/3754
|
| [26] | L. Chen, Mathematical ecology model and research method, Beijing: Science Press, 2017. |
Figures(12)

Lizhuang Huang, Yuan Zhuang, Qiong Liu. A mathematical model study on plant root pest management[J]. AIMS Mathematics, 2023, 8(4): 9965-9981. doi: 10.3934/math.2023504







 DownLoad:
DownLoad: