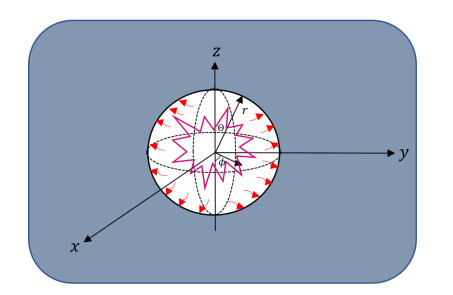
The current research aims to investigate thermodynamic responses to thermal media based on a modified mathematical model in the field of thermoelasticity. In this context, it was considered to present a new model with a fractional time derivative that includes Caputo-Fabrizio and Atangana-Baleanu fractional differential operators within the framework of the two-phase delay model. The proposed mathematical model is employed to examine the problem of an unbounded material with a spherical hole experiencing a reduced moving heat flow on its inner surface. The problem is solved analytically within the modified space utilizing the Laplace transform as the solution mechanism. An arithmetic inversion of the Laplace transform was performed and presented visually and tabularly for the studied distributions. In the tables, specific comparisons are introduced to evaluate the influences of different fractional operators and thermal properties on the response of all the fields examined.
Citation: Osama Moaaz, Ahmed E. Abouelregal. Multi-fractional-differential operators for a thermo-elastic magnetic response in an unbounded solid with a spherical hole via the DPL model[J]. AIMS Mathematics, 2023, 8(3): 5588-5615. doi: 10.3934/math.2023282
The current research aims to investigate thermodynamic responses to thermal media based on a modified mathematical model in the field of thermoelasticity. In this context, it was considered to present a new model with a fractional time derivative that includes Caputo-Fabrizio and Atangana-Baleanu fractional differential operators within the framework of the two-phase delay model. The proposed mathematical model is employed to examine the problem of an unbounded material with a spherical hole experiencing a reduced moving heat flow on its inner surface. The problem is solved analytically within the modified space utilizing the Laplace transform as the solution mechanism. An arithmetic inversion of the Laplace transform was performed and presented visually and tabularly for the studied distributions. In the tables, specific comparisons are introduced to evaluate the influences of different fractional operators and thermal properties on the response of all the fields examined.

| [1] |
M. Alquran, F. Yousef, F. Alquran, T. A. Sulaiman, A. Yusuf, Dual-wave solutions for the quadratic-cubic conformable-Caputo time-fractional Klein-Fock-Gordon equation, Math. Comput. Simulat., 185 (2021), 62–76. https://doi.org/10.1016/j.matcom.2020.12.014 doi: 10.1016/j.matcom.2020.12.014

|
| [2] | A. Hussanan, M. Z. Ismail, Samiulhaq, I. Khan, S. Sharidan, Radiation effect on unsteady MHD free convection flow in a porous medium with Newtonian heating, Int. J. Appl. Math. Stat., 42 (2013), 474–480. |
| [3] |
A. Khan, K. Ali Abro, A. Tassaddiq, I. Khan, Atangana–Baleanu and Caputo Fabrizio analysis of fractional derivatives for heat and mass transfer of second grade fluids over a vertical plate: a comparative study, Entropy, 19 (2017), 279. https://doi.org/10.3390/e19080279 doi: 10.3390/e19080279
|
| [4] | A. A. Shaikh, S. Qureshi, Comparative analysis of Riemann Liouville, Caputo-Fabrizio, and Atangana-Baleanu integrals, J. Appl. Math. Comput. Mech., 21 (2022), 91–101. |
| [5] | M. Caputo, M. Fabrizio, A new definition of fractional derivative without singular kernel, Progr. Fract. Differ. Appl., 1 (2015), 1–13. |
| [6] |
A. Atangana, D. Baleanu, New fractional derivatives with nonlocal and non-singular kernel: theory and application to heat transfer model, Therm. Sci., 20 (2016), 763–769. https://doi.org/10.48550/arXiv.1602.03408 doi: 10.48550/arXiv.1602.03408
|
| [7] | A. Atangana, D. Baleanu, Caputo-Fabrizio derivative applied to groundwater flow within confined aquifer, J. Eng. Mech., 143 (2016), D4016005. |
| [8] |
A. Atangana, I. Koca, Chaos in a simple nonlinear system with Atangana-Baleanu derivatives with fractional order, Chaos Soliton. Fract., 89 (2016), 447–454. https://doi.org/10.1016/j.chaos.2016.02.012 doi: 10.1016/j.chaos.2016.02.012
|
| [9] |
O. J. J. Algahtani, Comparing the Atangana-Baleanu and Caputo-Fabrizio derivative with fractional order: Allen Cahn model, Chaos Soliton. Fract., 89 (2016), 552–559. https://doi.org/10.1016/j.chaos.2016.03.026 doi: 10.1016/j.chaos.2016.03.026
|
| [10] |
H. Shatha, Atangana–Baleanu fractional framework of reproducing kernel technique in solving fractional population dynamics system, Chaos Soliton. Fract., 133 (2020), 109624. https://doi.org/10.1016/j.chaos.2020.109624 doi: 10.1016/j.chaos.2020.109624
|
| [11] |
A. Atangana, J. F. Gómez-Aguilar, Numerical approximation of Riemann–Liouville definition of fractional derivative: from Riemann–Liouville to Atangana–Baleanu, Numer. Meth. Part. Differ. Equ., 34 (2018), 1502–1523. https://doi.org/10.1002/num.22195 doi: 10.1002/num.22195
|
| [12] |
T. Abdeljawad, M. A. Hajji, Q. M. Al-Mdallal, F. Jarad, Analysis of some generalized ABC-fractional logistic models, Alex. Eng. J., 59 (2020), 2141–2148. https://doi.org/10.1016/j.aej.2020.01.030 doi: 10.1016/j.aej.2020.01.030
|
| [13] |
H. Abboubakar, P. Kumar, N. A. Rangaig, S. Kumar, A malaria model with Caputo–Fabrizio and Atangana–Baleanu derivatives, Int. J. Model. Simul. Sci., 12 (2021), 2150013. https://doi.org/10.1142/S1793962321500136 doi: 10.1142/S1793962321500136
|
| [14] |
T. Sitthiwirattham, R. Gul, K. Shah, I. Mahariq, J. Soontharanon, K. J. Ansari, Study of implicit-impulsive differential equations involving Caputo-Fabrizio fractional derivative, AIMS Math., 7 (2022), 4017–4037. https://doi.org/10.3934/math.2022222 doi: 10.3934/math.2022222
|
| [15] |
D. Baleanu, S. S. Sajjadi, A. Jajarmi, Z. Defterli, On a nonlinear dynomical system with both chaotic and nonchaotic behaviors: a new fractional analysis and control, Adv. Differ. Equ., 2021 (2021), 234. https://doi.org/10.1186/s13662-021-03393-x doi: 10.1186/s13662-021-03393-x
|
| [16] |
D. Baleanu, S. S. Sajjadi, J. H. Asad, A. Jajarmi, E. Estiri, Hyperchaotic behaviors, optimal control and synchronization of a nonautonomous cardiac conduction system, Adv. Differ. Equ., 2021 (2021), 175. https://doi.org/10.1186/s13662-021-03320-0 doi: 10.1186/s13662-021-03320-0
|
| [17] |
D. Baleanu, S. Zibaei, M. Namjoo, A. Jajarmi, A nonstandard finite difference scheme for the modeling and nonidentical synchronization of a noval fractional chaotic system, Adv. Differ. Equ., 2021 (2021), 308. https://doi.org/10.1186/s13662-021-03454-1 doi: 10.1186/s13662-021-03454-1
|
| [18] |
R. B. Hetnarski, J. Ignaczak, Generalized thermoelasticity, J. Therm. Stress., 22 (1999), 451–476. https://doi.org/10.1080/014957399280832 doi: 10.1080/014957399280832
|
| [19] |
H. W. Lord, Y. Shulman, A generalized dynamical theory of thermoelasticity, J. Mech. Phys. Solids, 15 (1967), 229–309. https://doi.org/10.1016/0022-5096(67)90024-5 doi: 10.1016/0022-5096(67)90024-5
|
| [20] |
A. E. Green, K. A. Lindsay, Thermoelasticity, J. Elasticity, 2 (1972), 1–7. https://doi.org/10.1007/BF00045689 doi: 10.1007/BF00045689
|
| [21] |
S. Chen, F. Liu, V. Anh, A novel implicit finite difference method for the one-dimensional fractional percolation equation, Numer. Algor., 56 (2011), 517–535. https://doi.org/10.1007/s11075-010-9402-0 doi: 10.1007/s11075-010-9402-0
|
| [22] |
R. Metzler, J. Klafter, The random walk's guide to anomalous diffusion: a fractional dynamics approach, Phys. Rep., 339 (2000), 1–77, 2000. https://doi.org/10.1016/S0370-1573(00)00070-3 doi: 10.1016/S0370-1573(00)00070-3
|
| [23] |
I. Podlubny, A. Chechkin, T. Skovranek, Y. Chen, B. M. Vinagre Jara, Matrix approach to discrete fractional calculus. Ⅱ. partial fractional differential equations, J. Comput. Phys., 228 (2009), 3137–3153. https://doi.org/10.1016/j.jcp.2009.01.014 doi: 10.1016/j.jcp.2009.01.014
|
| [24] |
H. Jafari, A. Golbabai, S. Seifi, K. Sayevand, Homotopy analysis method for solving multi-term linear and nonlinear diffusion-wave equations of fractional order, Comput. Math. Appl., 59 (2010), 1337–1344. https://doi.org/10.1016/j.camwa.2009.06.020 doi: 10.1016/j.camwa.2009.06.020
|
| [25] |
S Momani, Z. Odibat, Homotopy perturbation method for nonlinear partial differential equations of fractional order, Phys. Lett. A, 365 (2007), 345–350. https://doi.org/10.1016/j.physleta.2007.01.046 doi: 10.1016/j.physleta.2007.01.046
|
| [26] |
J. S. Duan, M. Li, Y. Wang, Y. L. An, Approximate solution of fractional differential equation by quadratic splines, Fractal Fract., 6 (2022), 369. https://doi.org/10.3390/fractalfract6070369 doi: 10.3390/fractalfract6070369
|
| [27] | S. K. Lydia, M. M. Jancirani, A. A. Anitha, Numerical solution of nonlinear fractional differential equations using kharrat-toma iterative method, Nat. Volatiles Essent. Oils, 8 (2021), 9878–9890. |
| [28] |
N. A. Zabidi, Z. A. Majid, A. Kilicman, Z. B. Ibrahim, Numerical solution of fractional differential equations with Caputo derivative by using numerical fractional predict–correct technique, Adv. Cont. Discr. Mod., 2022 (2022), 26. https://doi.org/10.1186/s13662-022-03697-6 doi: 10.1186/s13662-022-03697-6
|
| [29] |
H. Wang, F. Wu, D. Lei. A novel numerical approach for solving fractional order differential equations using hybrid functions, AIMS Math., 6 (2021), 5596–5611. https://doi.org/10.3934/math.2021331 doi: 10.3934/math.2021331
|
| [30] |
Z. F. Bonab, M. Javidi, Higher order methods for fractional differential equation based on fractional backward differentiation formula of order three, Math. Comput. Simul., 172 (2020), 71–89. https://doi.org/10.1016/j.matcom.2019.12.019 doi: 10.1016/j.matcom.2019.12.019
|
| [31] |
A. E. Green, P. M. Naghdi, A Re-examination of the basic postulates of thermomechanics, P. Roy. Soc. A Math. Phy., 432 (1991), 171–194. https://doi.org/10.1098/rspa.1991.0012 doi: 10.1098/rspa.1991.0012
|
| [32] |
A. E. Green, P. M. Naghdi, Thermoelasticity without energy dissipation, J. Elasticity, 31 (1993), 189–208. https://doi.org/10.1007/BF00044969 doi: 10.1007/BF00044969
|
| [33] |
. E. Green, P. M. Naghdi, On undamped heat waves in an elastic solid, J. Therm. Stresses, 15 (1992), 253–264. https://doi.org/10.1080/01495739208946136 doi: 10.1080/01495739208946136
|
| [34] |
D. Y. Tzou, A unified approach for heat conduction from macro- to micro-scales, J. Heat Transfer., 117 (1995), 8–16. https://doi.org/10.1115/1.2822329 doi: 10.1115/1.2822329
|
| [35] |
D. Y. Tzou, The generalized lagging response in small-scale and high-rate heating, Int. J. Heat Mass Transf., 38 (1995), 3231–3240. https://doi.org/10.1016/0017-9310(95)00052-B doi: 10.1016/0017-9310(95)00052-B
|
| [36] | D. Y. Tzou, Macro-to microscale heat transfer: the lagging behavior, New York: Taylor & Francis, 1997. |
| [37] |
S. K. Roychoudhuri, On a thermoelastic three-phase-lag model, J. Therm. Stresses, 30 (2007), 231–238. https://doi.org/10.1080/01495730601130919 doi: 10.1080/01495730601130919
|
| [38] | A. E. Abouelregal, On Green and Naghdi thermoelasticity model without energy dissipation with higher order time differential and phase-lags, J. Appl. Comput. Mech., 6 (2020), 445–456. |
| [39] |
A. E. Abouelregal, Two-temperature thermoelastic model without energy dissipation including higher order time-derivatives and two phase-lags, Mater. Res. Express, 6 (2019), 116535. https://doi.org/10.1088/2053-1591/ab447f doi: 10.1088/2053-1591/ab447f
|
| [40] | A. E. Abouelregal, Generalized mathematical novel model of thermoelastic diffusion with four phase lags and higher-order time derivative, Eur. Phys. J. Plus, 135 (2020), 263. |
| [41] |
A. E. Abouelregal, A novel generalized thermoelasticity with higher-order time-derivatives and three-phase lags, Multidiscip. Model. Ma., 16 (2019), 689–711. https://doi.org/10.1108/MMMS-07-2019-0138 doi: 10.1108/MMMS-07-2019-0138
|
| [42] |
A. E. Abouelregal, Ö. Civalek, H. F. Oztop, Higher-order time-differential heat transfer model with three-phase lag including memory-dependent derivatives, Int. Commun. Heat Mass, 128 (2021), 105649. https://doi.org/10.1016/j.icheatmasstransfer.2021.105649 doi: 10.1016/j.icheatmasstransfer.2021.105649
|
| [43] |
Y. Z. Povstenko, Fractional heat conduction equation and associated thermal stress, J. Therm. Stresses, 28 (2004), 83–102. https://doi.org/10.1080/014957390523741 doi: 10.1080/014957390523741
|
| [44] |
Y. Z. Povstenko, Fractional radial heat conduction in an infinite medium with a cylindrical cavity and associated thermal stresses, Mech. Res. Commun., 37 (2010), 436–440. https://doi.org/10.1016/j.mechrescom.2010.04.006 doi: 10.1016/j.mechrescom.2010.04.006
|
| [45] |
Y. Povstenko, Non-axisymmetric solutions to time-fractional diffusion-wave equation in an infinite cylinder, Fract. Calc. Appl. Anal., 14 (2011), 418–435. https://doi.org/10.2478/s13540-011-0026-4 doi: 10.2478/s13540-011-0026-4
|
| [46] |
Y. Povstenko, T. Kyrylych, Fractional thermoelasticity problem for an infinite solid with a penny-shaped crack under prescribed heat flux across its surfaces, Phil. Trans. R. Soc. A, 378 (2020), 20190289. https://doi.org/10.1098/rsta.2019.0289 doi: 10.1098/rsta.2019.0289
|
| [47] |
Y. Povstenko, T. Kyrylych, B. Woźna-Szcześniak, R. Kawa, A. Yatsko, An external circular crack in an infinite solid under axisymmetric heat flux loading in the framework of fractional thermoelasticity, Entropy, 24 (2022), 70. https://doi.org/10.3390/e24010070 doi: 10.3390/e24010070
|
| [48] |
Y. Qiao, X. Wang, H. Qi, H. Xu, Numerical simulation and parameters estimation of the time fractional dual-phase-lag heat conduction in femtosecond laser heating, Int. Commun. Heat Mass, 125 (2021), 105355. https://doi.org/10.1016/j.icheatmasstransfer.2021.105355 doi: 10.1016/j.icheatmasstransfer.2021.105355
|
| [49] |
Y. J. Yu, L. J. Zhao, Fractional thermoelasticity revisited with new definitions of fractional derivative, Eur. J. Mech. A Solid., 84 (2020), 104043. https://doi.org/10.1016/j.euromechsol.2020.104043 doi: 10.1016/j.euromechsol.2020.104043
|
| [50] |
Y. J. Yu, Z. C. Deng, Fractional order theory of Cattaneo-type thermoelasticity using new fractional derivatives, Appl. Math. Model., 87 (2020), 731–751. https://doi.org/10.1016/j.apm.2020.06.023 doi: 10.1016/j.apm.2020.06.023
|
| [51] |
Z. Xue, J. Liu, X. Tian, Y. Yu, Thermal shock fracture associated with a unified fractional heat conduction, Eur. J. Mech. A Solids, 85 (2021), 104129. https://doi.org/10.1016/j.euromechsol.2020.104129 doi: 10.1016/j.euromechsol.2020.104129
|
| [52] |
Y. Yu, Z. C. Deng, New insights on microscale transient thermoelastic responses for metals with electron-lattice coupling mechanism, Eur. J. Mech. A Solid., 80 (2020), 103887. https://doi.org/10.1016/j.euromechsol.2019.103887 doi: 10.1016/j.euromechsol.2019.103887
|
| [53] |
Y. Yu, Z. C. Deng, Fractional order thermoelasticity for piezoelectric materials, Fractals, 29 (2021), 2150082. https://doi.org/10.1142/S0218348X21500821 doi: 10.1142/S0218348X21500821
|
| [54] | C. Li, F. Zeng, Numerical methods for fractional calculus, Boca Raton: CRC Press, 2019. |
| [55] |
A. Atangana, On the new fractional derivative and application to nonlinear Fisher's reaction–diffusion equation, Appl. Math. Comput., 273 (2016), 948–956. https://doi.org/10.1016/j.amc.2015.10.021 doi: 10.1016/j.amc.2015.10.021
|
| [56] |
A. E. Abouelregal, M. Alesemi, Vibrational analysis of viscous thin beams stressed by laser mechanical load using a heat transfer model with a fractional Atangana-Baleanu operator, Case Stud. Therm. Eng., 34 (2022), 102028. https://doi.org/10.1016/j.csite.2022.102028 doi: 10.1016/j.csite.2022.102028
|
| [57] | N. Sarkar, A. Lahiri, Eigenvalue approach to two-temperature magneto-thermoelasticity, Vietnam J. Math. Math., 40 (2012), 13–30. |
| [58] |
A. Sur, Nonlocal memory-dependent heat conduction in a magneto-thermoelastic problem, Wave. Random Complex, 32 (2020), 251–271. https://doi.org/10.1080/17455030.2020.1770369 doi: 10.1080/17455030.2020.1770369
|
| [59] |
A. E. Aboueregal, H. M. Sedighi, The effect of variable properties and rotation in a visco-thermoelastic orthotropic annular cylinder under the Moore–Gibson–Thompson heat conduction model, P. I. Mech. Eng. L J. Mat., 235 (2021), 1004–1020. https://doi.org/10.1177/14644207209858 doi: 10.1177/14644207209858
|
| [60] |
A. E. Abouelregal, R. Alanazi, H. M. Sedighid, Thermal plane waves in unbounded nonlocal medium exposed to a moving heat source with a non-singular kernel and higher order time derivatives, Eng. Anal. Bound. Elem., 140 (2022), 464–475. https://doi.org/10.1016/j.enganabound.2022.04.032 doi: 10.1016/j.enganabound.2022.04.032
|
| [61] |
G. Honig, U. Hirdes, A method for the numerical inversion of Laplace transform, J. Comput. Appl. Math., 10 (1984), 113–132. https://doi.org/10.1016/0377-0427(84)90075-X doi: 10.1016/0377-0427(84)90075-X
|
| [62] |
H. Dubner, J. Abate, Numerical inversion of Laplace transforms by relating them to the finite Fourier cosine transform, J. Assoc. Comp. Mach., 15 (1968), 115–123. https://doi.org/10.1145/321439.321446 doi: 10.1145/321439.321446
|
| [63] |
F. R. De Hoog, J. H. Knight, A. N. Stokes, An improved method for numerical inversion of Laplace transforms, SIAM J. Sci. Statist. Comput., 3 (1982), 357–366. https://doi.org/10.1137/0903022 doi: 10.1137/0903022
|
| [64] |
A. E. Abouelregal, H. M. Sedighi, Magneto-thermoelastic behaviour of a finite viscoelastic rotating rod by incorporating Eringen's theory and heat equation including Caputo–Fabrizio fractional derivative, Eng. Comput., 2022. https://doi.org/10.1007/s00366-022-01645-2 doi: 10.1007/s00366-022-01645-2
|
| [65] |
T. He, L. Cao, S. Li, Dynamic response of a piezoelectric rod with thermal relaxation, J. Sound Vib., 306 (2007), 897–907. https://doi.org/10.1016/j.jsv.2007.06.018 doi: 10.1016/j.jsv.2007.06.018
|
| [66] | K. Cole, J. Beck, A. Haji-Sheikh, B. Litkouhi, Heat conduction using green's functions, 2nd, New York: Taylor & Francis, 2010. |
| [67] |
Z. B. Hou, R. Komanduri, General solutions for stationary/moving plane heat source problems in manufacturing and tribology, Int. J. Heat Mass, 43 (2000), 1679–1698. https://doi.org/10.1016/S0017-9310(99)00271-9 doi: 10.1016/S0017-9310(99)00271-9
|
| [68] | R. Viskanta, T. L. Bergman, Heat transfer in materials processing, New York: McGraw-Hill, 1998. |
| [69] |
G. Araya, G. Gutierrez, Analytical solution for a transient, three-dimensional temperature distribution due to a moving laser beam, Int. J. Heat Mass, 49 (2006), 4124–4131. https://doi.org/10.1016/j.ijheatmasstransfer.2006.03.026 doi: 10.1016/j.ijheatmasstransfer.2006.03.026
|
Figures(11) / Tables(1)

Osama Moaaz, Ahmed E. Abouelregal. Multi-fractional-differential operators for a thermo-elastic magnetic response in an unbounded solid with a spherical hole via the DPL model[J]. AIMS Mathematics, 2023, 8(3): 5588-5615. doi: 10.3934/math.2023282







 DownLoad:
DownLoad: