Citation: J. Brian Anderson, Jack Montgomery, Dan Jackson, Michael Kiernan, Chao Shi. Auburn University National Geotechnical Experimentation Site in Piedmont Residuum[J]. AIMS Geosciences, 2019, 5(3): 645-664. doi: 10.3934/geosci.2019.3.645

| [1] | DiMillio AF, Prince GC (1993) National geotechnical experimentation sites. Public Roads 57: 17–22. |
| [2] |
Borden RH, Shao L, Gupta A (1996) Dynamic properties of Piedmont residual soils. J Geotech Geoenviro Eng 122: 813–821. doi: 10.1061/(ASCE)0733-9410(1996)122:10(813)

|
| [3] |
Wang CE, Borden RH (1996) Deformation characteristics of Piedmont Residual Soils. J Geotech Eng 122: 822–830. doi: 10.1061/(ASCE)0733-9410(1996)122:10(822)
|
| [4] | Harris DE, Mayne PW (1994) Axial compression behavior of two drilled shafts in Piedmont residual soils. Proc, Int Conf Des and Constr of Deep Found, 2: 352–367. |
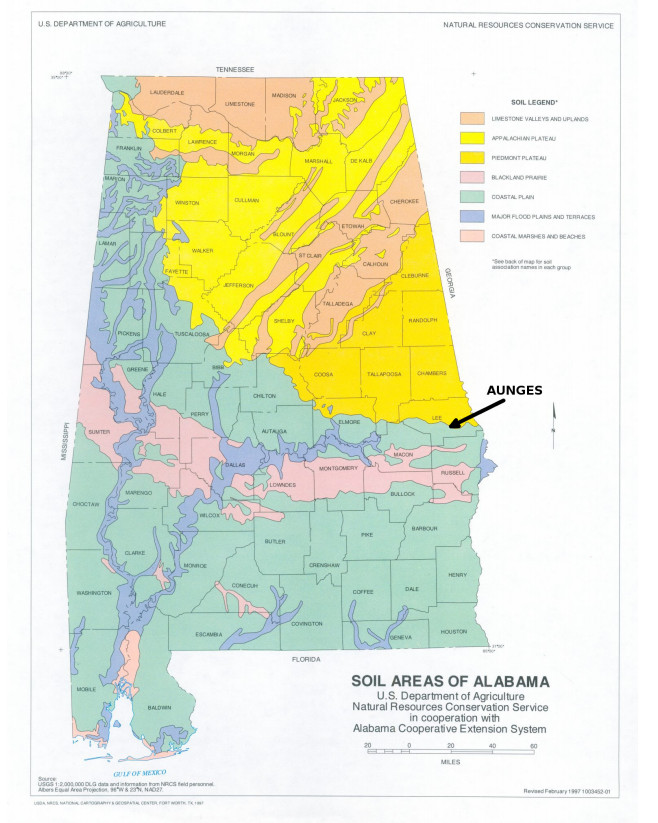
| [5] | United States Department of Agriculture (1997) Soil Areas of Alabama, map, USDA NRCS National Cartography and Geospatial Center, Fort Worth, Texas. |
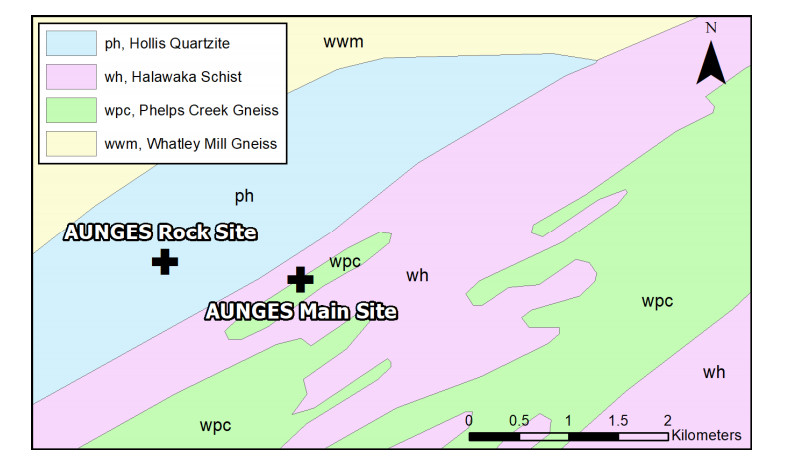
| [6] | Yokel LS (1996) Geology of the Chewacla Marble and Associated Units, Lee County, Alabama. Master's Thesis, Auburn University, Auburn, AL. |
| [7] | Kahle JK, Brown DA (2002) Performance of Laterally Loaded Drilled Sockets Founded in Weathered Quartzite. Auburn University Highway Research Center, Auburn, Alabama. |
| [8] | Szabo MW, Osborne WE, Copeland CW, et al. (1988) Geological Map of Alabama. Special Map 220, Geological Survey of Alabama. |
| [9] | Vinson JL, Brown DA (1997) Site Characterization of the Spring Villa Geotechnical Test Site and a Comparison of Strength and Stiffness Parameters for a Piedmont Residual Soil. Report No. IR-97-04, Highway Research Center, Harbert Engineering Center, Auburn University, AL. |
| [10] | Mayne PW, Brown DA, Vinson JL, et al. (2000) Site Characterization of Piedmont Residual Soils at the NGES, Opelika, Alabama. National Geotechnical Experimentation Sites, ASCE GSP No. 93, 160–185. |
| [11] | Mayne PW, Brown DA (2003) Site Characterization of Piedmont Residuum of North America. Charact Eng Prop Nat Soils 2: 1323–1339. |
| [12] | McGillivray AV (2007) Enhanced integration of shear wave velocity profiling in direct-push site characterization systems. Ph.D. Dissertation, Georgia Institute of Technology, Atlanta, GA. |
| [13] | Burrage RE (2015) Full Scale Testing of Two Excavations in an Unsaturated Piedmont Residual Soil. Doctoral Disseration, Auburn University. |
| [14] | Skinner Z (2019) Theoretical Modeling and Lateral Load Testing of Driven Steel Pile Bridge Bents. Masters's Thesis, Auburn University. |
| [15] |
Hebeler GL, Martinez A, Frost JD (2018) Interface Response-Based Soil Classification System. Can Geotech J 55: 1795–1811. doi: 10.1139/cgj-2017-0498
|
| [16] | Shi C (2018) Investigation of Deep Foundations at the Spring Villa National Geotechnical Experimentation Site. Master's Thesis, Auburn University. |
| [17] | Montgomery J, Shi C, Anderson JB (2018) An Updated Database for the Spring Villa National Geotechnical Experimentation Site. IFCEE 2018: Installation, Testing, and Analysis of Deep Foundations, ASCE GSP No. 294. |
| [18] | Brown DA (2002a) The Effect of Construction Technique on Axial Capacity of Drilled Foundations. Auburn University Highway Research Center, Auburn, Alabama. |
| [19] | Brown DA (2002b) Report of Statnanic Tests on Rock Sockets at Spring Villa, Alabama. Auburn University Highway Research Center, Auburn, Alabama. |
| [20] | Simpson M, Brown DA (2003) Development of P-Y curves for Piedmont residual soils. Auburn University Highway Research Center, Auburn, Alabama. |
| [21] | Brown DA (1999) An Experiment with Statnamic Lateral Loading of a Drilled Shaft. Geotechnical Special Publication No. 88: Analysis, Design, Construction and Testing of Deep Foundations, Proceedings of the OTRC '99 Conference, ASCE, 309–318. |
| [22] | Brown DA (2019) Personal communication. |
| [23] | Robinson B, Rausche F, Likins GE, et al. (2002) Dynamic Load Testing of Drilled Shafts at National Geotechnical Experimentation Sites. Deep Foundations 2002, An International Perspective on Theory, Design, Construction, and Performance, Geotechnical Special Publication No. 116. |
| [24] | Brown DA, Drew C (2000) Axial Capacity of Augered Displacement Piles at Auburn University. New Technological and Design Developments in Deep Foundations ASCE GSP No. 100. |
| [25] | Brown DA, Nilsson JP (1998) Prefabricated Foundation Elements for Substation Structures. Final Project Report for Alabama Power Co. |
| [26] | Brown DA, O'Neill WM, Hoit M, et al. (2001) Static and Dynamic Lateral Loading of Pile Groups. NCHRP 24-9, Transportation Research Board. |
| [27] | Brown DA (2002c) Effect of Construction on Axial Capacity of Drilled Foundations in Piedmont Soils. J Geotech Geoenvir Eng 128: 967–973. |
| [28] | Brown DA (2007) Rapid Lateral Load Testing of Deep Foundations. DFI 1: 54–62. |
| [29] |
Hodgson D, Schindler AK, Brown DA, et al. (2005) Self-consolidating concrete (SCC) for use in drilled shaft applications. J Math Civil Eng 17: 363–369. doi: 10.1061/(ASCE)0899-1561(2005)17:3(363)
|
| [30] | Mullins G (2004) Factors Affecting Anomaly Formation in Drilled Shafts-final report. Final Rep. Submitted Florida Department of Transportation, Fla |
| [31] | Mullins G, Ashmawy A (2005) Post grouting drilled shaft tips-Phase II final report. Final Rep. Submitted Florida Department of Transportation, Fla |
| [32] | Burrage RE, Anderson JB, Pando MA, et al. (2012) A Cost Effective Triaxial Test Method for Unsaturated Soils. Geotech Test J 35: 50–59. |
| [33] | Englert CM, Gómez JE, Wilkinson C, et al. (2015) Development of Removable Load Distributive Compressive Anchor Technology. IFCEE 2015, GSP No. 256, ASCE, Reston, VA. |
| [34] | Marshall JD, Anderson JB, Campbell J, et al. (2017) Experimental validation of analysis methods and design procedures for steel pile bridge bents. Auburn University Highway Research Center, Auburn, Alabama. |
| [35] | Anderson JB, Marshall JD, Campbell J, et al. (2018) Weak axis lateral load testing of a four H pile bent. IFCEE 2018, ASCE GSP 294, 419–427. |
| [36] | Anderson JB, Marshall JD (2019) Weak axis lateral load testing of a four vertical H pile bent in residual soil at the Auburn National Geotechnical Experimentation Site. ISGTS 2019. |
| [37] | Mayne PW (2000) Seismic Cone Testing at Spring Villa NGES Opelika-Auburn, Alabama. Available from: geosystems.ce.gatech.edu/Faculty/Mayne/Research/summer2000/opelika/opelika.htm. |
| [38] | Sowers GF, Richardson TL (1983) Residual Soils of Piedmont and Blue Ridge. Transp Res Rec, 10–16. |
| [39] |
Park C, Miller R, Xia J (1999) Multi-channel analysis of surface waves. Geophysics 64: 800–808. doi: 10.1190/1.1444590
|
| [40] | Martin GK, Mayne PW (1998) Seismic flat dilatometer tests in Piedmont residual soils. Geotech Site Charact 2: 837–843. |


Figures(14)

J. Brian Anderson, Jack Montgomery, Dan Jackson, Michael Kiernan, Chao Shi. Auburn University National Geotechnical Experimentation Site in Piedmont Residuum[J]. AIMS Geosciences, 2019, 5(3): 645-664. doi: 10.3934/geosci.2019.3.645







 DownLoad:
DownLoad: