For the problems of parametric uncertainties and actuator faults encountered during high-speed train operation, this paper proposes a neural network-based adaptive fault-tolerant control strategy for cooperation of multiple trains. First, a multi-train model with state constraints, disturbances, and actuator faults was established, and the radial basis function neural network was utilized to fit the unknown disturbance. Subsequently, the auxiliary control signal was introduced to compensate the impact of actuator faults on train. Then, when designing adaptive laws, the variations of basic resistance parameters were fully considered. By integrating adaptive laws with the adaptive fault-tolerant controller, the effect of disturbances on multi-train systems can be dynamically eliminated. The Lyapunov method was established to prove the stability of multi-train systems. Simulation results show that the proposed adaptive fault-tolerant control strategy can maintain the stability of multi-train systems and achieve cooperation of trains with actuator faults.
Citation: Hui Zhao, Hanhong Cui, Yuan Zhao, Xuewu Dai. A neural network-based adaptive fault-tolerant cooperation control for multiple trains with unknown parameters[J]. Electronic Research Archive, 2025, 33(6): 3931-3949. doi: 10.3934/era.2025174
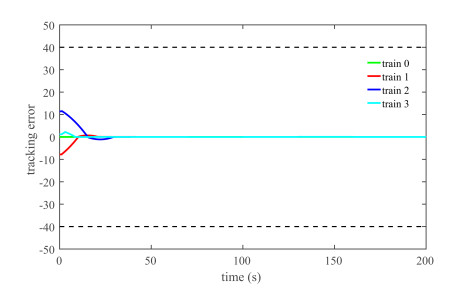
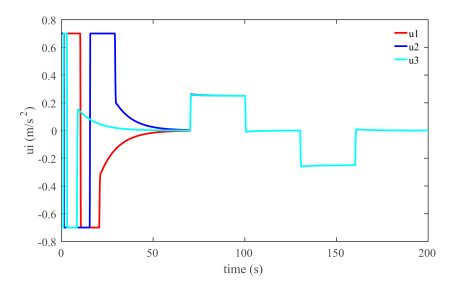
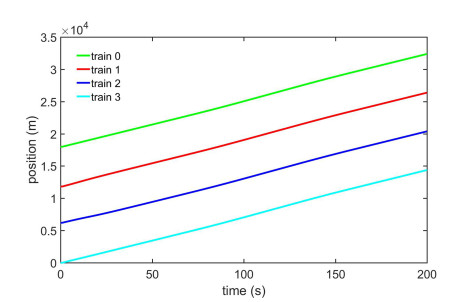
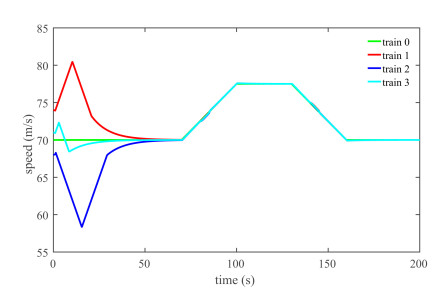
For the problems of parametric uncertainties and actuator faults encountered during high-speed train operation, this paper proposes a neural network-based adaptive fault-tolerant control strategy for cooperation of multiple trains. First, a multi-train model with state constraints, disturbances, and actuator faults was established, and the radial basis function neural network was utilized to fit the unknown disturbance. Subsequently, the auxiliary control signal was introduced to compensate the impact of actuator faults on train. Then, when designing adaptive laws, the variations of basic resistance parameters were fully considered. By integrating adaptive laws with the adaptive fault-tolerant controller, the effect of disturbances on multi-train systems can be dynamically eliminated. The Lyapunov method was established to prove the stability of multi-train systems. Simulation results show that the proposed adaptive fault-tolerant control strategy can maintain the stability of multi-train systems and achieve cooperation of trains with actuator faults.

| [1] |
H. Wang, Y. Li, J. Ren, Machine learning for fault diagnosis of high-speed train traction systems: a review, Front. Eng. Manage., 11 (2024), 62–78. https://doi.org/10.1007/s42524-023-0256-2 doi: 10.1007/s42524-023-0256-2

|
| [2] |
S. Gao, H. Dong, Y. Chen, B. Ning, Approximation-based robust adaptive automatic train control: an approach for actuator saturation, IEEE Trans. Intell. Transp. Syst., 14 (2013), 1733–1742. https://doi.org/10.1109/TITS.2013.2266255 doi: 10.1109/TITS.2013.2266255
|
| [3] |
S. Li, L. Yang, Z. Gao, L. Li, Optimal guaranteed cost cruise control for high-speed train movement, IEEE Trans. Intell. Transp. Syst., 17 (2016), 2879–2887. https://doi.org/10.1109/TITS.2016.2527827 doi: 10.1109/TITS.2016.2527827
|
| [4] |
M. Faieghi, A. Jalali, S. Mashhadi, Robust adaptive cruise control of high speed trains, ISA Trans., 53 (2014), 533–541. https://doi.org/10.1016/j.isatra.2013.12.007 doi: 10.1016/j.isatra.2013.12.007
|
| [5] |
Q. Song, Y. Song, T. Tang, B. Ning, Computationally inexpensive tracking control of high-speed trains with traction/braking saturation, IEEE Trans. Intell. Transp. Syst., 12 (2011), 1116–1125. https://doi.org/10.1016/10.1109/TITS.2011.2143409 doi: 10.1016/10.1109/TITS.2011.2143409
|
| [6] |
W. Bai, Z. Lin, H. Dong, B. Ning, Distributed cooperative cruise control of multiple high-speed trains under a state-dependent information transmission topology, IEEE Trans. Intell. Transp. Syst., 20 (2019), 2750–2763. https://doi.org/10.1109/TITS.2019.2893583 doi: 10.1109/TITS.2019.2893583
|
| [7] |
S. Li, L. Yang, Z. Gao, Coordinated cruise control for high-speed train movements based on a multi-agent model, Transp. Res. Part C Emerging Technol., 56 (2015), 281–292. https://doi.org/10.1016/j.trc.2015.04.016 doi: 10.1016/j.trc.2015.04.016
|
| [8] |
G. Guo, D. Li, Adaptive sliding mode control of vehicular platoons with prescribed tracking performance, IEEE Trans. Veh. Technol., 68 (2019), 7511–7520. https://doi.org/10.1109/TVT.2019.2921816 doi: 10.1109/TVT.2019.2921816
|
| [9] |
Y. Liu, Y. Zhou, S. Su, J. Xun, T. Tang, An analytical optimal control approach for virtually coupled high-speed trains with local and string stability, Transp. Res. Part C Emerging Technol., 125 (2021), 102886. https://doi.org/10.1016/j.trc.2020.102886 doi: 10.1016/j.trc.2020.102886
|
| [10] |
H. Hu, Z. He, K. Wang, X. Ma, S. Gao, Power-quality impact assessment for high-speed railway associated with high-speed trains using train timetable-Part Ⅱ: verifications, estimations and applications, IEEE Trans. Power Del., 31 (2016), 1482–1492. https://doi.org/10.1109/TPWRD.2015.2472961 doi: 10.1109/TPWRD.2015.2472961
|
| [11] |
S. Li, X. Li, K. Li, Robust output feedback cruise control for high-speed train movement with uncertain parameters, Chin. Phys. B, 21 (2015), 010503. https://doi.org/10.1088/1674-1056/24/1/010503 doi: 10.1088/1674-1056/24/1/010503
|
| [12] |
X. Lin, C. Ma, Q. Wang, Dual jitter suppression mechanism-based cooperation control for multiple high-speed trains with parametric uncertainty, Mathematics, 22 (2023), 1786. https://doi.org/10.3390/math11081786 doi: 10.3390/math11081786
|
| [13] |
Y. Chen, D. Huang, C. Xu, H. Dong, Iterative learning tracking control of high-speed trains with nonlinearly parameterized uncertainties and multiple time-varying delays, IEEE Trans. Intell. Transp. Syst., 23 (2022), 20476–20488. https://doi.org/10.1109/TITS.2022.3183608 doi: 10.1109/TITS.2022.3183608
|
| [14] |
H. Liu, L. Yang, H. Yang, Cooperative optimal control of the following operation of high-speed trains, IEEE Trans. Intell. Transp. Syst., 23 (2022), 17744–17755. https://doi.org/10.1109/TITS.2022.3163971 doi: 10.1109/TITS.2022.3163971
|
| [15] |
Y. Cao, J. Wen, L. Ma, Tracking and collision avoidance of virtual coupling train control system, Future Gener. Comput. Syst., 120 (2021), 76–90. https://doi.org/10.1016/j.future.2021.02.014 doi: 10.1016/j.future.2021.02.014
|
| [16] |
H. Ji, Z. Hou, R. Zhang, Adaptive iterative learning control for high-speed trains with unknown speed delays and input saturations, IEEE Trans. Autom. Sci. Eng., 13 (2016), 260–273. https://doi.org/10.1109/TASE.2014.2371816 doi: 10.1109/TASE.2014.2371816
|
| [17] |
H. Zhao, X. Dai, Y. Zhao, Sliding-mode adaptive control for multiple high-speed trains with state constraints and input saturation, Int. J. Control, Autom. Syst., 21 (2023), 3607–3616. https://doi.org/10.1007/s12555-022-0217-2 doi: 10.1007/s12555-022-0217-2
|
| [18] |
S. Gao, H. Dong, B. Ning, Q. Zhang, Cooperative prescribed performance tracking control for multiple high-speed trains in moving block signaling system, IEEE Trans. Intell. Transp. Syst., 20 (2019), 2740–2749. https://doi.org/10.1109/TITS.2018.2877171 doi: 10.1109/TITS.2018.2877171
|
| [19] |
D. Huang, Y. Jia, X. Li, L. Zhu, Prescribed performance tracking control for adjacent virtual coupling high-speed trains with input saturation, Int. J. Robust Nonlinear Control, 33 (2023), 9450–9468. https://doi.org/10.1002/rnc.6862 doi: 10.1002/rnc.6862
|
| [20] |
J. Yang, Y. Zhang, Y. Jin, Cooperative robust adaptive control of multiple trains based on RBFNN position output constraints, Expert Syst., 41 (2022), 13034. https://doi.org/10.1111/exsy.13034 doi: 10.1111/exsy.13034
|
| [21] |
D. Li, G. Guo, Prescribed performance concurrent control of connected vehicles with nonlinear third-order dynamics, IEEE Trans. Veh. Technol., 69 (2020), 14793–14802. https://doi.org/10.1109/TVT.2020.3040302 doi: 10.1109/TVT.2020.3040302
|
| [22] |
J. Zhang, H. Yang, K. Zhang, C. Xie, Tracking control for high-speed train with coupler constraints, IEEE Trans. Intell. Transp. Syst., 25 (2024), 14654–14668. https://doi.org/10.1109/TITS.2024.3392629 doi: 10.1109/TITS.2024.3392629
|
| [23] |
X. Guo, J. Wang, F. Liao, CNN-based distributed adaptive control for vehicle-following platoon with input saturation, IEEE Trans. Intell. Transp. Syst., 19 (2018), 3121–3132. https://doi.org/10.1109/TITS.2017.2772306 doi: 10.1109/TITS.2017.2772306
|
| [24] |
L. Zhu, D. Huang, X. Li, Q. Wang, Cooperative operation control of virtual coupling high-speed trains with input saturation and full-state constraints, IEEE Trans. Autom. Sci. Eng., 21 (2024), 3497–3510. https://doi.org/10.1109/TASE.2023.3280188 doi: 10.1109/TASE.2023.3280188
|
| [25] |
H. Zhao, X. Dai, Event-triggered adaptive control for multiple high-speed trains with deception attacks in bottleneck sections, Inf. Sci., 547 (2021), 470–481. https://doi.org/10.1016/j.ins.2020.08.012 doi: 10.1016/j.ins.2020.08.012
|
| [26] |
W. Bai, H. Dong, J. Lu, Y. Li, Event-triggering communication based distributed coordinated control of multiple high-speed trains, IEEE Trans. Veh. Technol., 70 (2021), 8556–8566. https://doi.org/10.1109/TVT.2021.3099529 doi: 10.1109/TVT.2021.3099529
|
| [27] |
W. Wang, J. Le, Z. Wang, Event-triggered consensus control for high-speed train with time-varying actuator fault, IEEE Access, 8 (2020), 50553–50564. https://doi.org/10.1109/ACCESS.2020.2979890 doi: 10.1109/ACCESS.2020.2979890
|
| [28] |
D. Li, P. Li, W. Cai, H. Dong, B. Liu, P. Ma, Neural adaptive fault tolerant control for high speed trains considering actuation notches and antiskid constraints, IEEE Trans. Intell. Transp. Syst., 20 (2019), 1706–1718. https://doi.org/10.1109/TITS.2018.2832635 doi: 10.1109/TITS.2018.2832635
|
| [29] |
Z. Mao, X. Yan, B. Jiang, M. Chen, Adaptive fault-tolerant sliding-mode control for high-speed trains with actuator faults and uncertainties, IEEE Trans. Intell. Transp. Syst., 21 (2019), 2449–2460. https://doi.org/10.1109/TITS.2019.2918543 doi: 10.1109/TITS.2019.2918543
|
| [30] |
X. Yao, S. Li, X. Li, Composite adaptive anti-disturbance fault tolerant control of high-speed trains with multiple disturbances, IEEE Trans. Intell. Transp. Syst., 23 (2022), 21799–21809. https://doi.org/10.1109/TITS.2022.3174265 doi: 10.1109/TITS.2022.3174265
|
| [31] |
L. Zhu, X. Li, D. Huang, H. Dong, L. Cai, Distributed cooperative fault-tolerant control of high-speed trains with input saturation and actuator faults, IEEE Trans. Intell. Veh., 8 (2022), 1241–1251. https://doi.org/10.1109/TIV.2022.3168550 doi: 10.1109/TIV.2022.3168550
|
| [32] |
S. Su, D. Wang, Y. Cao, Y. Zhou, T. Tang, Adaptive fault-tolerant fixed-time cruise control for virtually coupled train set, Transp. Res. Part C Emerging Technol., 156 (2023), 104348. https://doi.org/10.1016/j.trc.2023.104348 doi: 10.1016/j.trc.2023.104348
|
| [33] |
Z. Gao, Y. Zhang, G. Guo, Finite-time fault-tolerant prescribed performance control of connected vehicles with actuator saturation, IEEE Trans. Veh. Technol., 72 (2023), 1438–1448. https://doi.org/10.1109/TVT.2022.3209802 doi: 10.1109/TVT.2022.3209802
|
Figures(13)
Hui Zhao, Hanhong Cui, Yuan Zhao, Xuewu Dai. A neural network-based adaptive fault-tolerant cooperation control for multiple trains with unknown parameters[J]. Electronic Research Archive, 2025, 33(6): 3931-3949. doi: 10.3934/era.2025174







 DownLoad:
DownLoad: