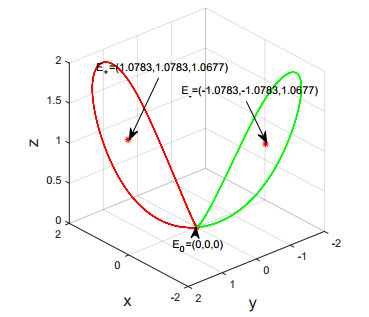
Revisiting a newly reported modified Chen system by both the definitions of $ \alpha $-limit and $ \omega $-limit set, Lyapunov function and Hamiltonian function, this paper seized a multitude of pairs of potential heteroclinic orbits to (1) $ E_{0} $ and $ E_{\pm} $, or (2) $ E_{+} $ or (3) $ E_{-} $, and homoclinic and heteroclinic orbits on its invariant algebraic surface $ Q = z - \frac{x^{2}}{2a} = 0 $ with cofactor $ -2a $, which is not available in the existing literature to the best of our knowledge. Particularly, the theoretical conclusions were verified via numerical examples.
Citation: Haijun Wang, Jun Pan, Guiyao Ke. Multitudinous potential homoclinic and heteroclinic orbits seized[J]. Electronic Research Archive, 2024, 32(2): 1003-1016. doi: 10.3934/era.2024049
Revisiting a newly reported modified Chen system by both the definitions of $ \alpha $-limit and $ \omega $-limit set, Lyapunov function and Hamiltonian function, this paper seized a multitude of pairs of potential heteroclinic orbits to (1) $ E_{0} $ and $ E_{\pm} $, or (2) $ E_{+} $ or (3) $ E_{-} $, and homoclinic and heteroclinic orbits on its invariant algebraic surface $ Q = z - \frac{x^{2}}{2a} = 0 $ with cofactor $ -2a $, which is not available in the existing literature to the best of our knowledge. Particularly, the theoretical conclusions were verified via numerical examples.

| [1] |
S. Sahoo, B. K. Roy, Design of multi-wing chaotic systems with higher largest Lyapunov exponent, Chaos, Solitons Fractals, 157 (2022), 111926. https://doi.org/10.1016/j.chaos.2022.111926 doi: 10.1016/j.chaos.2022.111926

|
| [2] |
E. Freire, A. J. Rodriguez-Luis, E. Gamero, E. Ponce, A case study for homoclinic chaos in an autonomous electronic circuit: A trip from Takens-Bogdanov to Hopf-Šil'nikov, Physica D, 62 (1993), 230–253. https://doi.org/10.1016/0167-2789(93)90284-8 doi: 10.1016/0167-2789(93)90284-8
|
| [3] |
P. Glendinning, C. Sparrow, Local and global behaviour near homoclinic orbits, J. Stat. Phys., 35 (1984), 645–696. https://doi.org/10.1007/BF01010828 doi: 10.1007/BF01010828
|
| [4] |
G. W. Hunt, M. A. Peletier, A. R. Champneys, P. D. Woods, M. Ahmerwaddee, C. J. Budd, et al., Cellular buckling in long structures, Nonlinear Dyn., 21 (2000), 3–29. https://doi.org/10.1023/A:1008398006403 doi: 10.1023/A:1008398006403
|
| [5] |
B. Aulbach, D. Flockerzi, The past in short hypercycles, J. Math. Biol., 27 (1989), 223–231. https://doi.org/10.1007/BF00276104 doi: 10.1007/BF00276104
|
| [6] |
N. J. Balmforth, Solitary waves and homoclinic orbits, Annu. Rev. Fluid Mech., 27 (1995), 335–373. https://doi.org/10.1146/annurev.fl.27.010195.002003 doi: 10.1146/annurev.fl.27.010195.002003
|
| [7] |
R. M. May, W. Leonard, Nonlinear aspect of competition between three species, SIAM J. Appl. Math., 29 (1975), 243–253. https://doi.org/10.1137/0129022 doi: 10.1137/0129022
|
| [8] |
J. Hofbauer, K. Sigmund, On the stabilizing effect of predator and competitors on ecological communities, J. Math. Biol., 27 (1975), 537–548. https://doi.org/10.1007/BF00288433 doi: 10.1007/BF00288433
|
| [9] |
B. Y. Feng, The heteroclinic cycle in the model of competition between n species and its stability, Acta Math. Appl. Sin., 14 (1998), 404–413. https://doi.org/10.1007/BF02683825 doi: 10.1007/BF02683825
|
| [10] |
W. S. Koon, M. W. Lo, J. E. Marsden, S. D. Ross, Heteroclinic connections between periodic orbits and resonance transitions in celestial mechanics, Chaos, 10 (2000), 427–469. https://doi.org/10.1063/1.166509 doi: 10.1063/1.166509
|
| [11] |
D. Wilczak, P. Zgliczyński, Heteroclinic connections between periodic orbits in planar restricted circular three body problem-A computer assisted proof, Commun. Math. Phys., 234 (2003), 37–75. https://doi.org/10.1007/s00220-002-0709-0 doi: 10.1007/s00220-002-0709-0
|
| [12] |
D. Wilczak, P. Zgliczyński, Heteroclinic connections between periodic orbits in planar restricted circular three body problem. part Ⅱ, Commun. Math. Phys., 259 (2005), 561–576. https://doi.org/10.1007/s00220-005-1471-x doi: 10.1007/s00220-005-1471-x
|
| [13] | S. Wiggins, Introduction to Applied Nonlinear Dynamical System and Chaos, 2nd edition, Springer, New York, 2003. https://doi.org/10.1007/978-1-4757-4067-7 |
| [14] | L. P. Shilnikov, A. L. Shilnikov, D. V. Turaev, L. O. Chua, Methods of Qualitative Theory in Nonlinear Dynamics, Part II, World Scientific, Singapore, 2001. https://doi.org/10.1142/4221 |
| [15] |
T. Li, G. Chen, G. Chen, On homoclinic and heteroclinic orbits of the Chen's system, Int. J. Bifurcation Chaos, 16 (2006), 3035–3041. https://doi.org/10.1142/S021812740601663X doi: 10.1142/S021812740601663X
|
| [16] |
G. Tigan, J. Llibre, Heteroclinic, homoclinic and closed orbits in the Chen system, Int. J. Bifurcation Chaos, 26 (2016), 1650072. https://doi.org/10.1142/S0218127416500723 doi: 10.1142/S0218127416500723
|
| [17] |
H. Wang, X. Li, More dynamical properties revealed from a 3D Lorenz-like system, Int. J. Bifurcation Chaos, 24 (2014), 1450133. https://doi.org/10.1142/S0218127414501338 doi: 10.1142/S0218127414501338
|
| [18] |
H. Wang, X. Li, On singular orbits and a given conjecture for a 3D Lorenz-like system, Nonlinear Dyn., 80 (2015), 969–981. https://doi.org/10.1007/s11071-015-1921-8 doi: 10.1007/s11071-015-1921-8
|
| [19] |
H. Wang, X. Li, Infinitely many heteroclinic orbits of a complex Lorenz system, Int. J. Bifurcation Chaos, 27 (2017), 1750110. https://doi.org/10.1142/S0218127417501103 doi: 10.1142/S0218127417501103
|
| [20] |
H. Wang, X. Li, A novel hyperchaotic system with infinitely many heteroclinic orbits coined, Chaos, Solitons Fractals, 106 (2018), 5–15. https://doi.org/10.1016/j.chaos.2017.10.029 doi: 10.1016/j.chaos.2017.10.029
|
| [21] |
H. Wang, F. Zhang, Bifurcations, ultimate boundedness and singular orbits in a unified hyperchaotic Lorenz-type system, Discrete Contin. Dyn. Syst. Ser. B, 25 (2020), 1791–1820. https://doi.org/10.3934/dcdsb.2020003 doi: 10.3934/dcdsb.2020003
|
| [22] |
H. Wang, H. Fan, J. Pan, Complex dynamics of a four-dimensional circuit system, Int. J. Bifurcation Chaos, 31 (2021), 2150208. https://doi.org/10.1142/S0218127421502084 doi: 10.1142/S0218127421502084
|
| [23] |
H. Wang, G. Ke, J. Pan, F. Hu, H. Fan, Multitudinous potential hidden Lorenz-like attractors coined, Eur. Phys. J. Spec. Top., 231 (2022), 359–368. https://doi.org/10.1140/epjs/s11734-021-00423-3 doi: 10.1140/epjs/s11734-021-00423-3
|
| [24] |
H. Wang, G. Ke, J. Pan, F. Hu, H. Fan, Q. Su, Two pairs of heteroclinic orbits coined in a new sub-quadratic Lorenz-like system, Eur. Phys. J. B, 96 (2023), 1–9. https://doi.org/10.1140/epjb/s10051-023-00491-5 doi: 10.1140/epjb/s10051-023-00491-5
|
| [25] |
Z. Li, G. Ke, H. Wang, J. Pan, F. Hu, Q. Su, Complex dynamics of a sub-quadratic Lorenz-like system, Open Phys., 21 (2023), 20220251. https://doi.org/10.1515/phys-2022-0251 doi: 10.1515/phys-2022-0251
|
| [26] | F. Tricomi, Integration of a differential equation presented in electrical engineering, Ann. Sc. Norm. Super. Pisa Cl. Sci., 2 (1933), 1–20. |
| [27] |
G. A. Leonov, Fishing principle for homoclinic and heteroclinic trajectories, Nonlinear Dyn., 78 (2014), 2751–2758. https://doi.org/10.1007/s11071-014-1622-8 doi: 10.1007/s11071-014-1622-8
|
| [28] |
G. Tigan, D. Turaev, Analytical search for homoclinic bifurcations in the Shimizu-Morioka model, Physica D, 240 (2011), 985–989. https://doi.org/10.1016/j.physd.2011.02.013 doi: 10.1016/j.physd.2011.02.013
|
| [29] | B. Feng, R. Hu, A survey on homoclinic and heteroclinic orbits, Appl. Math. E-Notes, 3 (2003), 16–37. |
| [30] |
X. Zhang, G. Chen, Constructing an autonomous system with infinitely many chaotic attractors, Chaos, 27 (2017), 071101. https://doi.org/10.1063/1.4986356 doi: 10.1063/1.4986356
|
| [31] |
X. Zhang, Boundedness of a class of complex Lorenz systems, Int. J. Bifurcation Chaos, 31 (2021), 2150101. https://doi.org/10.1142/S0218127421501017 doi: 10.1142/S0218127421501017
|
| [32] |
H. E. Gilardi-Velázquez, R. J. Escalante-González, E. Campos, Emergence of a square chaotic attractor through the collision of heteroclinic orbits, Eur. Phys. J. Spec. Top., 229 (2020), 1351–1360. https://doi.org/10.1140/epjst/e2020-900219-4 doi: 10.1140/epjst/e2020-900219-4
|
| [33] |
R. J. Escalante-González, E. Campos, Emergence of hidden attractors through the rupture of heteroclinic-like orbits of switched systems with self-excited attractors, Complexity, 2021 (2021), 1–24. https://doi.org/10.1155/2021/5559913 doi: 10.1155/2021/5559913
|
| [34] |
J. Llibre, M. Messias, P. R. D. Silva, Global dynamics in the Poincaré ball of the Chen system having invariant algebraic surface, Int. J. Bifurcation Chaos, 22 (2012), 1250154. https://doi.org/10.1142/S0218127412501544 doi: 10.1142/S0218127412501544
|
| [35] |
Q. Yang, Y. Chen, Complex dynamics in the unified Lorenz-type system, Int. J. Bifurcation Chaos, 24 (2014), 1450055. https://doi.org/10.1142/S0218127414500552 doi: 10.1142/S0218127414500552
|
Figures(9) / Tables(4)
Haijun Wang, Jun Pan, Guiyao Ke. Multitudinous potential homoclinic and heteroclinic orbits seized[J]. Electronic Research Archive, 2024, 32(2): 1003-1016. doi: 10.3934/era.2024049







 DownLoad:
DownLoad: