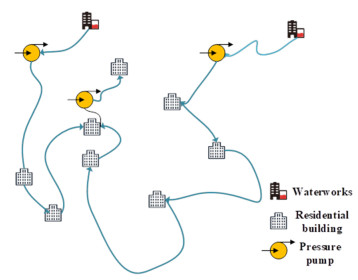
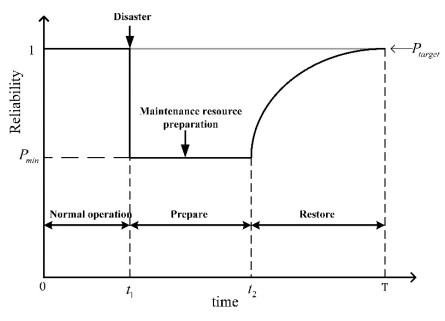
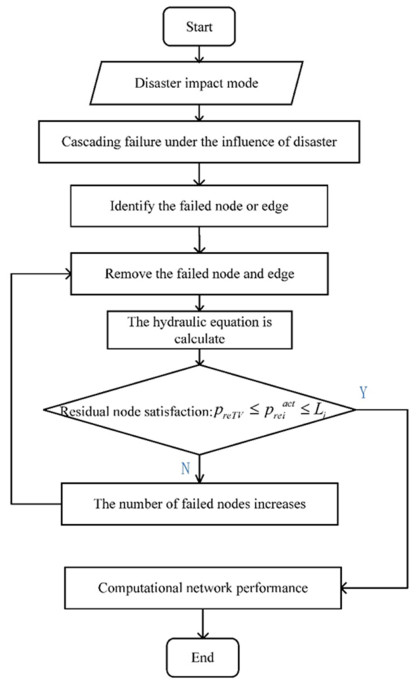
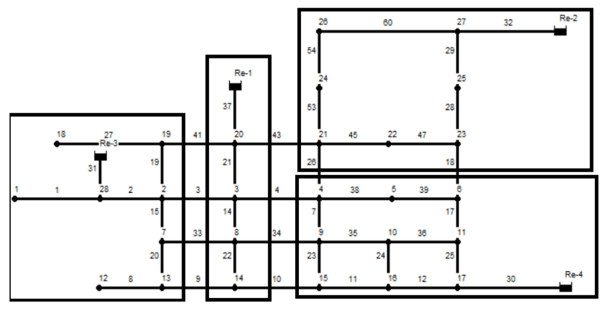
Urban water networks are important infrastructures for cities. However, urban water networks are vulnerable to natural disasters, causing interruptions in water. A timely analysis of the reliability of urban water networks to natural disasters can reduce the impact of natural disasters. In this paper, from the perspective of network reliability, the reliability analysis method of urban water networks under disaster is proposed. First, a reliability model is established with the flow rate of nodes in the water network as the index. Second, the user's demand is considered, as well as the impact of water pressure on water use. Therefore, a node failure model considering node water pressure and flow rate is established. The performance degradation of the urban water network is analyzed by analyzing the cascading failure process of the network. Third, the recovery process of the urban water network is analyzed, and the changes in the reliability of the urban water network before and after the disaster are analyzed to assess the ability of the urban water network to resist the disaster. Finally, an urban water network consisting of 28 nodes, 42 edges and 4 reservoirs is used to verify the effectiveness of the proposed method.
Citation: Hongyan Dui, Yong Yang, Xiao Wang. Reliability analysis and recovery measure of an urban water network[J]. Electronic Research Archive, 2023, 31(11): 6725-6745. doi: 10.3934/era.2023339
Urban water networks are important infrastructures for cities. However, urban water networks are vulnerable to natural disasters, causing interruptions in water. A timely analysis of the reliability of urban water networks to natural disasters can reduce the impact of natural disasters. In this paper, from the perspective of network reliability, the reliability analysis method of urban water networks under disaster is proposed. First, a reliability model is established with the flow rate of nodes in the water network as the index. Second, the user's demand is considered, as well as the impact of water pressure on water use. Therefore, a node failure model considering node water pressure and flow rate is established. The performance degradation of the urban water network is analyzed by analyzing the cascading failure process of the network. Third, the recovery process of the urban water network is analyzed, and the changes in the reliability of the urban water network before and after the disaster are analyzed to assess the ability of the urban water network to resist the disaster. Finally, an urban water network consisting of 28 nodes, 42 edges and 4 reservoirs is used to verify the effectiveness of the proposed method.

| [1] |
A. Bagheri, M. Darijani, A. Asgary, S. Morid, Crisis in urban water systems during the reconstruction period: a system dynamics analysis of alternative policies after the 2003 earthquake in Bam-Iran, Water Resour. Manage., 24 (2010), 2567–2596. https://doi.org/10.1007/s11269-009-9568-1 doi: 10.1007/s11269-009-9568-1

|
| [2] |
M. Mehryar, A. Hafezalkotob, A. Azizi, F. M. Sobhani, Dynamic zoning of the network using cooperative transmission and maintenance planning: A solution for sustainability of water distribution networks, Reliab. Eng. Syst. Saf., 235 (2023), 2567–2596. https://doi.org/10.1016/j.ress.2023.109260 doi: 10.1016/j.ress.2023.109260
|
| [3] |
A. Davis, Water system service categories, post-earthquake interaction, and restoration strategies, Earthquake Spectra, 30 (2014), 1487–1509. https://doi.org/10.1193/022912EQS058M doi: 10.1193/022912EQS058M
|
| [4] |
L. Romero-Ben, D. Alves, J. Blesa, G. Cembrano, V. Puig, E. Duviella, Leak detection and localization in water distribution networks: Review and perspective, Annu. Rev. Control, 55 (2023), 392–419. https://doi.org/10.1016/j.arcontrol.2023.03.012 doi: 10.1016/j.arcontrol.2023.03.012
|
| [5] |
H. Dui, X. Wei, L. Xing, L. Chen, Performance-based maintenance analysis and resource allocation in irrigation networks, Reliab. Eng. Syst. Saf., 230 (2023), 108910. https://doi.org/10.1016/j.ress.2022.108910 doi: 10.1016/j.ress.2022.108910
|
| [6] |
Z. Song, W. Liu, S. Shu, Resilience-based post-earthquake recovery optimization of water distribution networks, Int. J. Disaster Risk Reduct., 74 (2022), 102934. https://doi.org/10.1016/j.ijdrr.2022.102934 doi: 10.1016/j.ijdrr.2022.102934
|
| [7] |
Y. Gu, X. Fu, Z. Liu, X. Xu, A. Chen, Performance of transportation network under perturbations: Reliability, vulnerability, and resilience, Transp. Res. Part E Logist. Transp. Rev., 133 (2020), 101809. https://doi.org/10.1016/j.tre.2019.11.003 doi: 10.1016/j.tre.2019.11.003
|
| [8] |
G. Gnecco, Y. Hadas, M. Sanguineti, A game-theoretic approach for reliability evaluation of public transportation transfers with stochastic features, EURO J. Transp. Logist., 11 (2022), 100090. https://doi.org/10.1016/j.ejtl.2022.100090 doi: 10.1016/j.ejtl.2022.100090
|
| [9] |
H. Dui, Y. Yang, Y. A. Zhang, Y. Zhu, Recovery analysis and maintenance priority of metro networks based on importance measure, Mathematics, 10 (2022), 3989.3. https://doi.org/10.3390/math10213989 doi: 10.3390/math10213989
|
| [10] |
X. Guo, Q. Du, Y. Li, Y. Zhou, Y. Wang, Y. Huang, et al., Cascading failure and recovery of metro-bus double-layer network considering recovery propagation, Transp. Res. Part D Transp. Environ., 122 (2023), 103861. https://doi.org/10.1016/j.trd.2023.103861 doi: 10.1016/j.trd.2023.103861
|
| [11] |
H. Yang, D. Du, J. Wang, X. Wang, F. Zhang, Reshaping China's urban networks and their determinants: High-speed rail vs. air networks, Transp. Policy, 143 (2023). https://doi.org/10.1016/j.tranpol.2023.09.007 doi: 10.1016/j.tranpol.2023.09.007
|
| [12] |
H. Dui, S. Chen, S, J, Wang. Failure-oriented maintenance analysis of nodes and edges in network systems, Reliab. Eng. Syst. Saf., 215 (2021), 107894. https://doi.org/10.1016/j.ress.2021.107894 doi: 10.1016/j.ress.2021.107894
|
| [13] |
J. Zhou, D. W. Coit, F. A. Felder, S. Tsianikas, Combined optimization of system reliability improvement and resilience with mixed cascading failures in dependent network systems, Reliab. Eng. Syst. Saf., 237 (2023), 109376. https://doi.org/10.1016/j.ress.2023.109376 doi: 10.1016/j.ress.2023.109376
|
| [14] |
H. Emamjomeh, R. A. Jazany, H. Kayhani, I. Hajirasouliha, M. R. Bazargan-Lari, Reliability of water networks subjected to seismic hazard: Application of an improved entropy function, Reliab. Eng. Syst. Saf., 197 (2020), 106828. https://doi.org/10.1016/j.ress.2020.106828 doi: 10.1016/j.ress.2020.106828
|
| [15] |
J. Xing, Y. Wu, D. Huang, X. Liu, Transfer learning for robust urban network-wide traffic volume estimation with uncertain detector deployment scheme, Electron. Res. Arch., 31 (2023), 207–228. https://doi.org/10.3934/era.2023011 doi: 10.3934/era.2023011
|
| [16] |
Q. Shuang, M. Zhang, Y. Yuan, Node vulnerability of water networks under cascading failures, Reliab. Eng. Syst. Saf., 124 (2014), 132–141. https://doi.org/10.1016/j.ress.2013.12.002 doi: 10.1016/j.ress.2013.12.002
|
| [17] |
H. Dui, K. Liu, S. Wu, Cascading failures and resilience optimization of hospital infrastructure systems against the COVID-19, Comput. Ind. Eng., 179 (2023), 109158. https://doi.org/10.1016/j.cie.2023.109158 doi: 10.1016/j.cie.2023.109158
|
| [18] |
J. Zhang, J. Huang, Z. Zhang, Analysis of the effect of node attack method on cascading failures in multi-layer directed networks, Chaos Solitons Fractals, 168 (2023), 113156. https://doi.org/10.1016/j.chaos.2023.113156 doi: 10.1016/j.chaos.2023.113156
|
| [19] |
S. Wang, Y. Yang, L. Sun, X. Li, Y. Li, K. Guo, Controllability robustness against cascading failure for complex logistic network based on dynamic cascading failure model, IEEE Access, 8 (2020), 127450–127461. https://doi.org/10.1109/ACCESS.2020.3008476 doi: 10.1109/ACCESS.2020.3008476
|
| [20] |
H. C. Phan, A. S. Dhar, G. Hu, R. Sadiq, Managing water main breaks in distribution networks—A risk-based decision making, Reliab. Eng. Syst. Saf., 191 (2019), 106581. https://doi.org/10.1016/j.ress.2019.106581 doi: 10.1016/j.ress.2019.106581
|
| [21] |
Z. Li, J. Zhu, J. He, The effects of digital financial inclusion on innovation and entrepreneurship: A network perspective, Electron. Res. Arch., 30 (2022), 4697–4715. https://doi.org/10.3934/era.2022238 doi: 10.3934/era.2022238
|
| [22] |
S. E. Chang, T. McDaniels, J. Fox, R. Dhariwal, H. Longstaff, Toward disaster‐resilient cities: Characterizing resilience of infrastructure systems with expert judgments, Risk Anal., 34 (2014), 416–434. https://doi.org/10.1111/risa.12133 doi: 10.1111/risa.12133
|
| [23] |
X. Li, L. Zhang, Y. Hao, Z. Shi, P. Zhang, X. Xiong, et al., Understanding resilience of urban food-energy-water nexus system: Insights from an ecological network analysis of megacity Beijing, Sustainable Cities Soc., 95 (2023), 104605. https://doi.org/10.1016/j.scs.2023.104605 doi: 10.1016/j.scs.2023.104605
|
| [24] |
W. Liu, Z. Song, M. Ouyang, Lifecycle operational resilience assessment of urban water networks, Reliab. Eng. Syst. Saf., 198 (2020), 106859. https://doi.org/10.1016/j.ress.2020.106859 doi: 10.1016/j.ress.2020.106859
|
| [25] |
R. Patriarca, F. Simone, G. D. Gravio, Modelling cyber resilience in a water treatment and distribution system, Reliab. Eng. Syst. Saf., 226 (2022), 108653. https://doi.org/10.1016/j.ress.2022.108653 doi: 10.1016/j.ress.2022.108653
|
| [26] |
F. Meng, G. Fu, R. Farmani, C. Sweetapple, D. Butler, Topological attributes of network resilience: A study in water distribution systems, Water Res., 143 (2018), 376–386. https://doi.org/10.1016/j.watres.2018.06.048 doi: 10.1016/j.watres.2018.06.048
|
| [27] |
H. M. Tornyeviadzi, F. A. Neba, H. Mohammed, R. Seidu, Nodal vulnerability assessment of water networks: An integrated Fuzzy AHP-TOPSIS approach, Int. J. Crit. Infrastruct. Prot., 34 (2021), 100434. https://doi.org/10.1016/j.ijcip.2021.100434 doi: 10.1016/j.ijcip.2021.100434
|
| [28] |
A. H. Ebrahimi, M. M. Mortaheb, N. Hassani, M. Taghizadeh-yazdi, A resilience-based practical platform and novel index for rapid evaluation of urban water network using hybrid simulation, Sustainable Cities Soc., 82 (2022), 103884. https://doi.org/10.1016/j.scs.2022.103884 doi: 10.1016/j.scs.2022.103884
|
| [29] |
S. A. Zarghami, I. Gunawan, F. Schultmann, Integrating entropy theory and cospanning tree technique for redundancy analysis of water networks, Reliab. Eng. Syst. Saf., 176 (2018), 102–112. https://doi.org/10.1016/j.ress.2018.04.003 doi: 10.1016/j.ress.2018.04.003
|
| [30] |
T. Liu, G. Bai, J. Tao, Y. Zhang, Y. Fang, B. Xu, Modeling and evaluation method for resilience analysis of multi-state networks, Reliab. Eng. Syst. Saf., 226 (2022), 108663. https://doi.org/10.1016/j.ress.2022.108663 doi: 10.1016/j.ress.2022.108663
|
Figures(15) / Tables(1)
Hongyan Dui, Yong Yang, Xiao Wang. Reliability analysis and recovery measure of an urban water network[J]. Electronic Research Archive, 2023, 31(11): 6725-6745. doi: 10.3934/era.2023339







 DownLoad:
DownLoad: