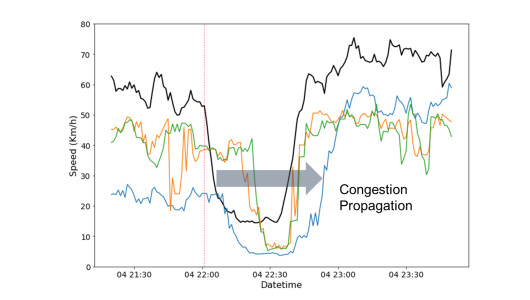
The accurate estimation of time delays is crucial in traffic congestion analysis, as this information can be used to address fundamental questions regarding the origin and propagation of traffic congestion. However, the exact measurement of time delays during congestion remains a challenge owing to the complex propagation process between roads and high uncertainty regarding future behavior. To overcome this challenge, we propose a novel time delay estimation method for the propagation of traffic congestion due to accidents using lag-specific transfer entropy (TE). The proposed method adopts Markov bootstrap techniques to quantify uncertainty in the time delay estimator. To the best of our knowledge, our proposed method is the first to estimate time delays based on causal relationships between adjacent roads. We validated the method's efficacy using simulated data, as well as real user trajectory data obtained from a major GPS navigation system in South Korea.
Citation: YongKyung Oh, JiIn Kwak, Sungil Kim. Time delay estimation of traffic congestion propagation due to accidents based on statistical causality[J]. Electronic Research Archive, 2023, 31(2): 691-707. doi: 10.3934/era.2023034
The accurate estimation of time delays is crucial in traffic congestion analysis, as this information can be used to address fundamental questions regarding the origin and propagation of traffic congestion. However, the exact measurement of time delays during congestion remains a challenge owing to the complex propagation process between roads and high uncertainty regarding future behavior. To overcome this challenge, we propose a novel time delay estimation method for the propagation of traffic congestion due to accidents using lag-specific transfer entropy (TE). The proposed method adopts Markov bootstrap techniques to quantify uncertainty in the time delay estimator. To the best of our knowledge, our proposed method is the first to estimate time delays based on causal relationships between adjacent roads. We validated the method's efficacy using simulated data, as well as real user trajectory data obtained from a major GPS navigation system in South Korea.

| [1] |
H. Nguyen, W. Liu, F. Chen, Discovering congestion propagation patterns in spatio-temporal traffic data, IEEE Trans. Big Data, 3 (2016), 169–180. https://doi.org/10.1109/TBDATA.2016.2587669 doi: 10.1109/TBDATA.2016.2587669

|
| [2] |
J. Y. Lee, J. I. Kwak, Y. K. Oh, S. Kim, Quantifying incident impacts and identifying influential features in urban traffic networks, Transportmetrica B Transp. Dyn., 2022 (2022), 1–22. https://doi.org/10.1080/21680566.2022.2063205 doi: 10.1080/21680566.2022.2063205
|
| [3] | P. Newson, J. Krumm, Hidden markov map matching through noise and sparseness, in Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, (2009), 336–343. https://doi.org/10.1145/1653771.1653818 |
| [4] |
F. G. Habtemichael, M. Cetin, K. A. Anuar, Incident-induced delays on freeways: Quantification method by grouping similar traffic patterns, Transp. Res. Record, 2484 (2015), 60–69. https://doi.org/10.3141/2484-07 doi: 10.3141/2484-07
|
| [5] |
A. Garib, A. E. Radwan, H. Al-Deek, Estimating magnitude and duration of incident delays, J. Transp. Eng., 123 (1997), 459–466. https://doi.org/10.1061/(ASCE)0733-947X(1997)123:6(459) doi: 10.1061/(ASCE)0733-947X(1997)123:6(459)
|
| [6] |
D. Nam, F. Mannering, An exploratory hazard-based analysis of highway incident duration, Transp. Res. Part A Policy Pract., 34 (2000), 85–102. https://doi.org/10.1016/S0965-8564(98)00065-2 doi: 10.1016/S0965-8564(98)00065-2
|
| [7] |
M. Zhu, H. F. Yang, C. Liu, Z. Pu, Y. Wang, Real-time crash identification using connected electric vehicle operation data, Accid. Anal. Prev., 173 (2022), 106708. https://doi.org/10.1016/j.aap.2022.106708 doi: 10.1016/j.aap.2022.106708
|
| [8] |
D. Cao, J. Wu, X. Dong, H. Sun, X. Qu, Z. Yang, Quantification of the impact of traffic incidents on speed reduction: A causal inference based approach, Accid. Anal. Prev., 157 (2021), 10616. https://doi.org/10.1016/j.aap.2021.106163 doi: 10.1016/j.aap.2021.106163
|
| [9] |
C. Knapp, G. Carter, The generalized correlation method for estimation of time delay, IEEE Trans. Acoust. Speech Signal Process., 24 (1976), 320–327. https://doi.org/10.1109/TASSP.1976.1162830 doi: 10.1109/TASSP.1976.1162830
|
| [10] |
M. Souden, J. Benesty, S. Affes, Broadband source localization from an eigenanalysis perspective, IEEE Trans. Audio Speech Lang. Process., 18 (2009), 1575–1587. https://doi.org/10.1109/TASL.2009.2038556 doi: 10.1109/TASL.2009.2038556
|
| [11] | P. Marmaroli, X. Falourd, H. Lissek, A comparative study of time delay estimation techniques for road vehicle tracking, in Acoustics 2012, 2012. |
| [12] |
S. R. Chandra, H. Al-Deek, Cross-correlation analysis and multivariate prediction of spatial time series of freeway traffic speeds, Transp. Res. Record, 2061 (2008), 64–76. https://doi.org/10.3141/2061-08 doi: 10.3141/2061-08
|
| [13] |
C. Shen, Analysis of detrended time-lagged cross-correlation between two nonstationary time series, Phys. Lett. A, 379 (2015), 680–687. https://doi.org/10.1016/j.physleta.2014.12.036 doi: 10.1016/j.physleta.2014.12.036
|
| [14] |
R. T. Vassoler, G. F. Zebende, Dcca cross-correlation coefficient apply in time series of air temperature and air relative humidity, Phys. A Stat. Mech. Its Appl., 391 (2012), 2438–2443. https://doi.org/10.1016/j.physa.2011.12.015 doi: 10.1016/j.physa.2011.12.015
|
| [15] | S. Sun, C. Zhang, Y. Zhang, Traffic flow forecasting using a spatio-temporal bayesian network predictor, in International Conference on Artificial Neural Networks, (2005), 273–278. https://doi.org/10.1007/11550907_43 |
| [16] | S. Chawla, Y. Zheng, J. Hu, Inferring the root cause in road traffic anomalies, in 2012 IEEE 12th International Conference on Data Mining, (2012), 141–150. https://doi.org/10.1109/ICDM.2012.104 |
| [17] |
Y. Xiao, Y. Zhao, G. Wu, Y. Jing, Study on delay propagation relations among airports based on transfer entropy, IEEE Access, 8 (2020), 97103–97113. https://doi.org/10.1109/ACCESS.2020.2996301 doi: 10.1109/ACCESS.2020.2996301
|
| [18] | W. Härdle, J. Horowitz, J. P. Kreiss, Bootstrap methods for time series, in Handbook of Statistics, 30 (2012), 3–26. https://doi.org/10.1111/j.1751-5823.2003.tb00485.x |
| [19] |
T. Schreiber, Measuring information transfer, Phys. Rev. Lett., 85 (2000), 461. https://doi.org/10.1103/PhysRevLett.85.461 doi: 10.1103/PhysRevLett.85.461
|
| [20] |
C. E. Shannon, A mathematical theory of communication, Bell Syst. Technical J., 27 (1948), 379–423. https://doi.org/10.1002/j.1538-7305.1948.tb01338.x doi: 10.1002/j.1538-7305.1948.tb01338.x
|
| [21] |
M. Wibral, N. Pampu, V. Priesemann, F. Siebenhühner, H. Seiwert, M. Lindner, et al., Measuring information-transfer delays, PloS One, 8 (2013), e55809. https://doi.org/10.1371/journal.pone.0055809 doi: 10.1371/journal.pone.0055809
|
| [22] |
R. Marschinski, H. Kantz, Analysing the information flow between financial time series, Eur. Phys. J. B Condens. Matter Complex Syst., 30 (2002), 275–281. https://doi.org/10.1140/epjb/e2002-00379-2 doi: 10.1140/epjb/e2002-00379-2
|
| [23] | W. C. Hong, P. F. Pai, S. L. Yang, R. Theng, Highway traffic forecasting by support vector regression model with tabu search algorithms, in The 2006 IEEE International Joint Conference on Neural Network Proceedings, (2006), 1617–1621. https://doi.org/10.1109/IJCNN.2006.246627 |
| [24] |
S. R. Chandra, H. Al-Deek, Predictions of freeway traffic speeds and volumes using vector autoregressive models, J. Intell. Transp. Syst., 13 (2009), 53–72. https://doi.org/10.1080/15472450902858368 doi: 10.1080/15472450902858368
|
| [25] |
E. I. Vlahogianni, M. G. Karlaftis, J. C. Golias, Short-term traffic forecasting: Where we are and where we're going, Transp. Res. Part C Emerging Technol., 43 (2014), 3–19. https://doi.org/10.1016/j.trc.2014.01.005 doi: 10.1016/j.trc.2014.01.005
|
| [26] |
D. Pavlyuk, Short-term traffic forecasting using multivariate autoregressive models, Procedia Eng., 178 (2017), 57–66. https://doi.org/10.1016/j.proeng.2017.01.062 doi: 10.1016/j.proeng.2017.01.062
|
| [27] |
Z. Song, Y. Guo, Y. Wu, J. Ma, Short-term traffic speed prediction under different data collection time intervals using a sarima-sdgm hybrid prediction model, PloS One, 14 (2019), e0218626. https://doi.org/10.1371/journal.pone.0218626 doi: 10.1371/journal.pone.0218626
|
| [28] | E. Ogasawara, L. C. Martinez, D. De Oliveira, G. Zimbr{ã}o, G. L. Pappa, M. Mattoso, Adaptive normalization: A novel data normalization approach for non-stationary time series, in The 2010 International Joint Conference on Neural Networks (IJCNN), (2010), 1–8. https://doi.org/10.1109/IJCNN.2010.5596746 |
| [29] | J. Wang, S. Su, Y. Li, J. Chen, D. Shi, Desaturated probability integral transform for normalizing power system measurements in data-driven manipulation detection, in 2019 IEEE Power & Energy Society General Meeting (PESGM), (2019), 1–5. https://doi.org/10.1109/PESGM40551.2019.8973800 |
| [30] | G. Casella, R. L. Berger, Statistical Inference, Cengage Learning, 2021. |
| [31] | V. Witkovsky, On the exact two-sided tolerance intervals for univariate normal distribution and linear regression, Austrian J. Stat., 43 (2014), 279–292. |
Figures(7) / Tables(6)
YongKyung Oh, JiIn Kwak, Sungil Kim. Time delay estimation of traffic congestion propagation due to accidents based on statistical causality[J]. Electronic Research Archive, 2023, 31(2): 691-707. doi: 10.3934/era.2023034







 DownLoad:
DownLoad: